Chapter 11 Three Dimensional Geometry
THREE DIMENSIONAL GEOMETRY
The moving power of mathematical invention is not reasoning but imagination. - A.DEMORGAN
11.1 Introduction
In Class XI, while studying Analytical Geometry in two dimensions, and the introduction to three dimensional geometry, we confined to the Cartesian methods only. In the previous chapter of this book, we have studied some basic concepts of vectors. We will now use vector algebra to three dimensional geometry. The purpose of this approach to 3-dimensional geometry is that it makes the study simple and elegant*.
In this chapter, we shall study the direction cosines and direction ratios of a line joining two points and also discuss about the equations of lines and planes in space under different conditions, angle between two lines, two planes, a line and a plane, shortest distance between two skew lines and distance of a point from a plane. Most of

Leonhard Euler $(\mathbf{1 7 0 7 - 1 7 8 3 })$ the above results are obtained in vector form. Nevertheless, we shall also translate these results in the Cartesian form which, at times, presents a more clear geometric and analytic picture of the situation.
11.2 Direction Cosines and Direction Ratios of a Line
From Chapter 10, recall that if a directed line $L$ passing through the origin makes angles $\alpha, \beta$ and $\gamma$ with $x, y$ and $z$-axes, respectively, called direction angles, then cosine of these angles, namely, $\cos \alpha, \cos \beta$ and $\cos \gamma$ are called direction cosines of the directed line $L$.
If we reverse the direction of $L$, then the direction angles are replaced by their supplements, i.e., $\pi-\alpha, \pi-\beta$ and $\pi-\gamma$. Thus, the signs of the direction cosines are reversed. \footnotetext{
- For various activities in three dimensional geometry, one may refer to the Book “A Hand Book for designing Mathematics Laboratory in Schools”, NCERT, 2005 }
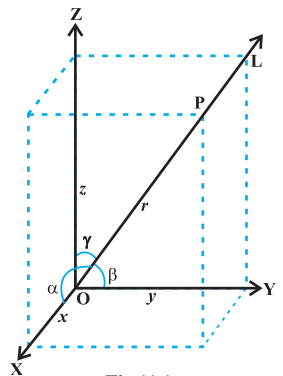
Fig 11.1
Note that a given line in space can be extended in two opposite directions and so it has two sets of direction cosines. In order to have a unique set of direction cosines for a given line in space, we must take the given line as a directed line. These unique direction cosines are denoted by $l, m$ and $n$.
Remark If the given line in space does not pass through the origin, then, in order to find its direction cosines, we draw a line through the origin and parallel to the given line. Now take one of the directed lines from the origin and find its direction cosines as two parallel line have same set of direction cosines.
Any three numbers which are proportional to the direction cosines of a line are called the direction ratios of the line. If $l, m, n$ are direction cosines and $a, b, c$ are direction ratios of a line, then $a=\lambda l, b=\lambda m$ and $c=\lambda n$, for any nonzero $\lambda \in \mathbf{R}$.
5 Note Some authors also call direction ratios as direction numbers.
Let $a, b, c$ be direction ratios of a line and let $l, m$ and $n$ be the direction cosines (d.c’s) of the line. Then
$$ \frac{l}{a}=\frac{m}{b}=\frac{n}{c}=k \text{ (say), } k \text{ being a constant. } $$
Therefore
$$ l=a k, m=b k, n=c k $$
But
Therefore
$$ l^{2}+m^{2}+n^{2}=1 $$
$$ k^{2}(a^{2}+b^{2}+c^{2})=1 $$
or
$$ k= \pm \frac{1}{\sqrt{a^{2}+b^{2}+c^{2}}} $$
Hence, from (1), the d.c.’s of the line are
$$ l= \pm \frac{a}{\sqrt{a^{2}+b^{2}+c^{2}}}, m= \pm \frac{b}{\sqrt{a^{2}+b^{2}+c^{2}}}, n= \pm \frac{c}{\sqrt{a^{2}+b^{2}+c^{2}}} $$s
where, depending on the desired sign of $k$, either a positive or a negative sign is to be taken for $l, m$ and $n$.
For any line, if $a, b, c$ are direction ratios of a line, then $k a, k b, k c ; k \neq 0$ is also a set of direction ratios. So, any two sets of direction ratios of a line are also proportional. Also, for any line there are infinitely many sets of direction ratios.
11.2.1 Direction cosines of a line passing through two points
Since one and only one line passes through two given points, we can determine the direction cosines of a line passing through the given points $P(x_1, y_1, z_1)$ and $Q(x_2, y_2, z_2)$ as follows (Fig 11.2 (a)).
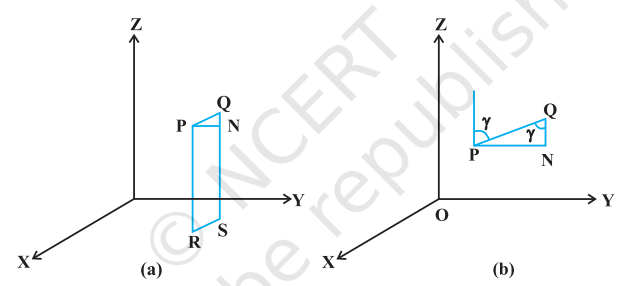
Fig 11.2
Let $l, m, n$ be the direction cosines of the line PQ and let it makes angles $\alpha, \beta$ and $\gamma$ with the $x, y$ and $z$-axis, respectively.
Draw perpendiculars from $P$ and $Q$ to $XY$-plane to meet at $R$ and $S$. Draw a perpendicular from $P$ to $QS$ to meet at $N$. Now, in right angle triangle $PNQ, \angle PQN=\gamma$ (Fig 11.2 (b)).
Therefore, $$\quad \cos \gamma=\frac{NQ}{PQ}=\frac{z_2-z_1}{PQ}$$
Similarly
$$ \cos \alpha=\frac{x_2-x_1}{PQ} \text{ and } \cos \beta=\frac{y_2-y_1}{PQ} $$
Hence, the direction cosines of the line segment joining the points $P(x_1, y_1, z_1)$ and $Q(x_2, y_2, z_2)$ are
$$ \frac{x_2-x_1}{PQ}, \frac{y_2-y_1}{PQ}, \frac{z_2-z_1}{PQ} $$
where
$$ PQ=\sqrt{(x_2-x_1)^{2}+(y_2-y_1)^{2}+(z_2-z_1)^{2}} $$
Note The direction ratios of the line segment joining $P(x_1, y_1, z_1)$ and $Q(x_2, y_2, z_2)$ may be taken as
$$ x_2-x_1, y_2-y_1, z_2-z_1 \text{ or } x_1-x_2, y_1-y_2, z_1-z_2 $$
11.3 Equation of a Line in Space
We have studied equation of lines in two dimensions in Class XI, we shall now study the vector and cartesian equations of a line in space.
A line is uniquely determined if
(i) it passes through a given point and has given direction, or
(ii) it passes through two given points.
11.3.1 Equation of a line through a given point and parallel to $\vec{a}$ given vector $\vec{b}$
Let $\vec{a}$ be the position vector of the given point A with respect to the origin $O$ of the rectangular coordinate system. Let $l$ be the line which passes through the point $A$ and is parallel to a given vector $\vec{b}$. Let $\vec{r}$ be the position vector of an arbitrary point $P$ on the line (Fig 11.3).
Then $\overrightarrow{{}AP}$ is parallel to the vector $\vec{b}$, i.e., $\overrightarrow{{}AP}=\lambda \vec{b}$, where $\lambda$ is some real number.
But
$$ \overrightarrow{{}AP}=\overrightarrow{{}OP}-\overrightarrow{{}OA} $$
i.e.
$$\lambda \vec{b}=\vec{r}-\vec{a}$$
Conversely, for each value of the parameter $\lambda$, this equation gives the position vector of a point $P$ on the line. Hence, the vector equation of the line is given by
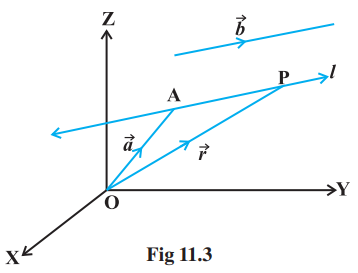
$$ \vec{r}=\vec{a}+\gg \vec{b} $$
Remark If $\vec{b}=a \hat{i}+b \hat{j}+c \hat{k}$, then $a, b, c$ are direction ratios of the line and conversely, if $a, b, c$ are direction ratios of a line, then $\vec{b}=a \hat{i}+b \hat{j}+c \hat{k}$ will be the parallel to the line. Here, $b$ should not be confused with $|\vec{b}|$.
Derivation of cartesian form from vector form
Let the coordinates of the given point $A$ be $(x_1, y_1, z_1)$ and the direction ratios of the line be $a, b, c$. Consider the coordinates of any point $P$ be $(x, y, z)$. Then
$$ \overrightarrow{{}r}=x \hat{i}+y \hat{j}+z \hat{k} ; \overrightarrow{{}a}=x_1 \hat{i}+y_1 \hat{j}+z_1 \hat{k} $$
and
$$ \vec{b}=a \hat{i}+b \hat{j}+c \hat{k} $$
Substituting these values in (1) and equating the coefficients of $\hat{i}, \hat{j}$ and $\hat{k}$, we get
$$ x=x_1+\lambda a ; \quad y=y_1+\lambda b ; z=z_1+\lambda c $$
These are parametric equations of the line. Eliminating the parameter $\lambda$ from (2), we get
$$ \frac{x-x_1}{a}=\frac{y-y_1}{b}=\frac{z-z_1}{c} $$
This is the Cartesian equation of the line.
Note If $l, m, n$ are the direction cosines of the line, the equation of the line is
$$ \frac{x-x_1}{l}=\frac{y-y_1}{m}=\frac{z-z_1}{n} $$
11.4 Angle between Two Lines
Let $L_1$ and $L_2$ be two lines passing through the origin and with direction ratios $a_1, b_1, c_1$ and $a_2, b_2, c_2$, respectively. Let $P$ be a point on $L_1$ and $Q$ be a point on $L_2$. Consider the directed lines $OP$ and $OQ$ as given in Fig 11.6. Let $\theta$ be the acute angle between OP and OQ. Now recall that the directed line segments OP and OQ are vectors with components $a_1, b_1, c_1$ and $a_2, b_2, c_2$, respectively. Therefore, the angle $\theta$ between them is given by
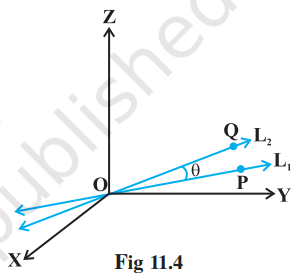
$$ \cos \theta=|\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^{2}+b_1^{2}+c_1^{2}} \sqrt{a_2^{2}+b_2^{2}+c_2^{2}}}| $$
The angle between the lines in terms of $\sin \theta$ is given by
$$ \begin{aligned} \sin \theta & =\sqrt{1-\cos ^{2} \theta} \\ & =\sqrt{1-\frac{(a_1 a_2+b_1 b_2+c_1 c_2)^{2}}{(a_1^{2}+b_1^{2}+c_1^{2})(a_2^{2}+b_2^{2}+c_2^{2})}} \\ & =\frac{\sqrt{(a_1^{2}+b_1^{2}+c_1^{2})(a_2^{2}+b_2^{2}+c_2^{2})-(a_1 a_2+b_1 b_2+c_1 c_2)^{2}}}{\sqrt{(a_1^{2}+b_1^{2}+c_1^{2})} \sqrt{(a_2^{2}+b_2^{2}+c_2^{2})}} \\ & =\frac{\sqrt{(a_1 b_2-a_2 b_1)^{2}+(b_1 c_2-b_2 c_1)^{2}+(c_1 a_2-c_2 a_1)^{2}}}{\sqrt{a_1^{2}+b_1^{2}+c_1^{2}} \sqrt{a_2^{2}+b_2^{2}+c_2^{2}}} \end{aligned} $$
Note In case the lines $L_1$ and $L_2$ do not pass through the origin, we may take lines $L_1^{\prime}$ and $L_2^{\prime}$ which are parallel to $L_1$ and $L_2$ respectively and pass through the origin.
If instead of direction ratios for the lines $L_1$ and $L_2$, direction cosines, namely, $l_1, m_1, n_1$ for $L_1$ and $l_2, m_2, n_2$ for $L_2$ are given, then (1) and (2) takes the following form:
$$ \cos \theta=|l_1 l_2+m_1 m_2+n_1 n_2| \quad(\text{ as } l_1^{2}+m_1^{2}+n_1^{2}=1=l_2^{2}+m_2^{2}+n_2^{2}) $$
and
$$ \sin \theta=\sqrt{(l_1 m_2-l_2 m_1)^{2}-(m_1 n_2-m_2 n_1)^{2}+(n_1 l_2-n_2 l_1)^{2}} $$
Two lines with direction ratios $a_1, b_1, c_1$ and $a_2, b_2, c_2$ are
(i) perpendicular i.e. if $\theta=90^{\circ}$ by (1)
$$ a_1 a_2+b_1 b_2+c_1 c_2=0 $$
(ii) parallel i.e. if $\theta=0$ by (2)
$$ \frac{a_1}{a_2}=\frac{b_1}{b_2}=\frac{c_1}{c_2} $$
Now, we find the angle between two lines when their equations are given. If $\theta$ is acute the angle between the lines
then
$$ \begin{aligned} \vec{r} & =\bar{a}_1+\vec{b}_1 \text { and } \vec{r}=\vec{a}_2+\vec{b}_2 \\ \cos \theta & =\left|\frac{\vec{b}_1 \cdot \vec{b}_2}{\left|\vec{b}_1\right|\left|\vec{b}_2\right|}\right| \end{aligned} $$
In Cartesian form, if $\theta$ is the angle between the lines
$$ \frac{x-x_1}{a_1}=\frac{y-y_1}{b_1}=\frac{z-z_1}{c_1} $$
and
$$ \frac{x-x_2}{a_2}=\frac{y-y_2}{b_2}=\frac{z-z_2}{c_2} $$
where, $a_1, b _{1,} c_1$ and $a _{2,}, b_2, c_2$ are the direction ratios of the lines (1) and (2), respectively, then
$$ \cos \theta=|\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^{2}+b_1^{2}+c_1^{2}} \sqrt{a_2^{2}+b_2^{2}+c_2^{2}}}| $$
11.5 Shortest Distance between Two Lines
If two lines in space intersect at a point, then the shortest distance between them is zero. Also, if two lines in space are parallel, then the shortest distance between them will be the perpendicular distance, i.e. the length of the perpendicular drawn from a point on one line onto the other line.
Further, in a space, there are lines which are neither intersecting nor parallel. In fact, such pair of lines are non coplanar and are called skew lines. For example, let us consider a room of size 1, 3, 2 units along
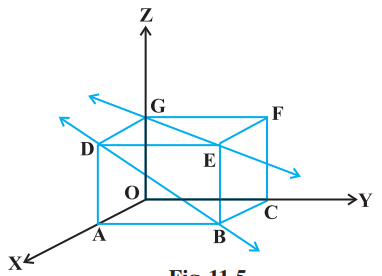
Fig 11.5 $x, y$ and $z$-axes respectively Fig 11.5.
The line GE that goes diagonally across the ceiling and the line DB passes through one corner of the ceiling directly above A and goes diagonally down the wall. These lines are skew because they are not parallel and also never meet.
By the shortest distance between two lines we mean the join of a point in one line with one point on the other line so that the length of the segment so obtained is the smallest.
For skew lines, the line of the shortest distance will be perpendicular to both the lines.
11.5.1 Distance between two skew lines
We now determine the shortest distance between two skew lines in the following way: Let $l_1$ and $l_2$ be two skew lines with equations (Fig. 11.6)
and
$$ \begin{aligned} & \vec{r} = \vec{a} _ {1}+\lambda \vec{b} _ {1} \\ & \vec{r} = \vec{a} _ {2}+\mu \vec{b} _ {2} \end{aligned} $$
Take any point $ S $ on $l_ {1} $ with position vector $ \overrightarrow{{}a}_ {1} $ and $ T $ on $ l_ {2} $, with position vector $ \overrightarrow{{}a}_ {2} $. Then the magnitude of the shortest distance vector will be equal to that of the projection of ST along the direction of the line of shortest distance (See 10.6.2).
If $\overrightarrow{{}PQ}$ is the shortest distance vector between $l_1$ and $l_2$, then it being perpendicular to both $ \vec{b} _1$ and $ \vec{b} _2$, the unit vector $\hat{n}$ along $\overrightarrow{{}PQ}$ would therefore be
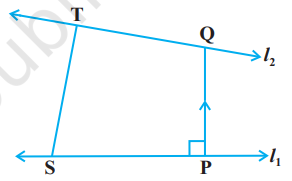
Fig 11.6
$$ \hat{n} = \frac{ \vec{b} _ {1} \times \vec{b} _ {2}}{| \vec{b} _ {1} \times \vec{b} _ {2}|} $$
Then
$$ \overrightarrow{{}PQ}=d \hat{n} $$
where, $d$ is the magnitude of the shortest distance vector. Let $\theta$ be the angle between $\overrightarrow{{}ST}$ and $\overrightarrow{{}PQ}$. Then
But
$$ \begin{aligned} PQ & = ST|\cos \theta| \\ \cos \theta & = |\frac{\overrightarrow{{}PQ} \cdot \overrightarrow{{}ST}}{|\overrightarrow{{}PQ}||\overrightarrow{{}ST}|}| \\ & = |\frac{d \hat{n} \cdot( \vec{a} _ {2}- \vec{a} _ {1})}{d ST}| \quad(\text{ since } \overrightarrow{{}ST}= \vec{a} _ {2}- \vec{a} _ {1}) \\ & = |\frac{( \vec{b} _ {1} \times \vec{b} _ {2}) \cdot( \vec{a} _ {2}- \vec{a} _ {1})}{ST| \vec{b} _ {1} \times \vec{b} _ {2}|}| \end{aligned} $$
Hence, the required shortest distance is
or
$$ \begin{aligned} & d = PQ = ST|\cos \theta| \\ & \boldsymbol{{}d} = |\frac{(\overrightarrow{{}b}_ {1} \times \overrightarrow{{}b}_ {2}) \cdot( \vec{a} _ {2} \times \vec{a} _ {1})}{| \vec{b} _ {1} \times \vec{b} _ {2}|}| \end{aligned} $$
##Cartesian form
The shortest distance between the lines
and
$$ \begin{aligned} & l_1: \frac{x-x_1}{a_1}=\frac{y-y_1}{b_1}=\frac{z-z_1}{c_1} \\ & l_2: \frac{x-x_2}{a_2}=\frac{y-y_2}{b_2}=\frac{z-z_2}{c_2} \end{aligned} $$
$$ \left|\frac{ \begin{vmatrix} x_2-x_1 & y_2-y_1 & z_2-z_1 \\ a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \end{vmatrix} }{\sqrt{(b_1 c_2-b_2 c_1)^{2}+(c_1 a_2-c_2 a_1)^{2}+(a_1 b_2-a_2 b_1)^{2}}}\right| $$
11.5.2 Distance between parallel lines
If two lines $l_1$ and $l_2$ are parallel, then they are coplanar. Let the lines be given by
and
$$ \vec{r}= \vec{a} _1+\lambda \vec{b} $$
$$ \vec{r}= \vec{a} _2+\mu \vec{b} $$
where, $ \vec{a} _1$ is the position vector of a point $S$ on $l_1$ and $ \vec{a} _2$ is the position vector of a point $T$ on $l_2$ Fig 11.7.
As $l_1, l_2$ are coplanar, if the foot of the perpendicular from $T$ on the line $l_1$ is $P$, then the distance between the lines $l_1$ and $l_2=|TP|$.
Let $\theta$ be the angle between the vectors $\overrightarrow{{}ST}$ and $\vec{b}$. Then
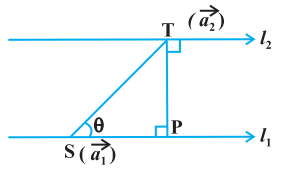
Fig 11.7
$$ \vec{b} \times \overrightarrow{{}ST}=(|\vec{b}||\overrightarrow{{}ST}| \sin \theta) \hat{n} \ldots $$
where $\hat{n}$ is the unit vector perpendicular to the plane of the lines $l_1$ and $l_2$.
But
$$ \overrightarrow{{}ST} = \vec{a} _2 - \vec{a} _1 $$
Therefore, from (3), we get
$$ \begin{matrix} & \quad \vec{b} \times ( \vec{a} _2 - \vec{a} _1) = \vec{b} , |PT| \hat{n} \quad (\text{since } PT = ST \sin \theta) \\ \text{i.e.,} & |\vec{b} \times ( \vec{a} _2 - \vec{a} _1)| = |\vec{b}| , |PT| \cdot 1 \quad (\text{as } |\hat{n}| = 1) \end{matrix} $$
Hence, the distance between the given parallel lines is
$$ d=|\overrightarrow{{}\mathbf{P T}}| = |\frac{\vec{b} \times(\vec{a} _ {2}-\vec{a} _ {1})}{|\vec{b}|}| $$
11.6 Plane
A plane is determined uniquely if any one of thefollowing is known:
(i) thenormal to the plane and itsdist ance from the origin is given, i.e., equation of a plane in normal form.
(ii) it passes through a point and is perpendicular to a given direction.
(iii) it passes through three given non collinear points.
Now we shall find vector and Cartesian equations of the planes.
11.6.1 Equation of a plane in normal form
Consider a plane whose perpendicular distance from theorigin is $d(d \neq 0)$. Fig 11.10
If $\overrightarrow{\mathrm{ON}}$ isthe normal from the origin to the plane, and $\overline{k^{\circ}}$ is the unit normal vector along $\overrightarrow{\mathrm{ON}}$. Then $\overrightarrow{\mathrm{ON}}=d \stackrel{\check{w}}{ }$. Let $\mathrm{P}$ be any point on the plane. Therefore, $\overrightarrow{\mathrm{NP}}$ is perpendicular to $\overrightarrow{\mathrm{ON}}$.
Therefore, $\overrightarrow{\mathrm{NP}} \cdot \overrightarrow{\mathrm{ON}}=0$
Let $\vec{r}$ betheposition vect or of the point $\mathrm{P}$, then $\overrightarrow{\mathrm{NP}}=\vec{r}-d \stackrel{\leftarrow}{4}$ (as $\overrightarrow{\mathrm{ON}}+\overrightarrow{\mathrm{NP}} \overrightarrow{\mathrm{OP}_{\mathrm{P}}}$ ) Therefore, (1) becomes
$$ (\vec{r}-d \hat{n}) \cdot d \hat{n}=0 $$
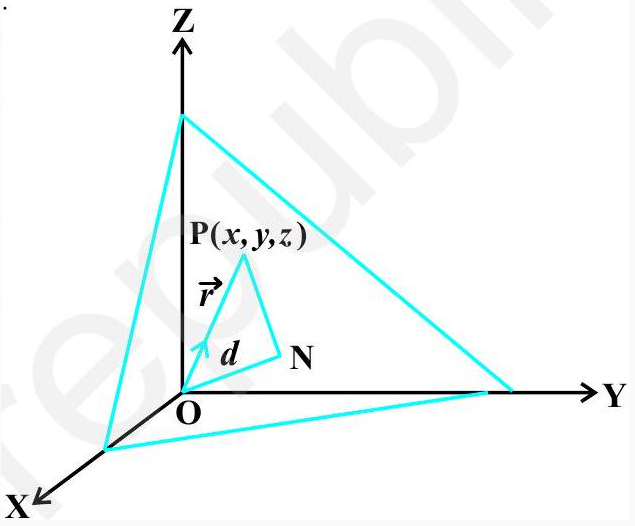
Fig 11.10
or
$$ (\vec{r}-d \hat{n}) \cdot \hat{n}=0 \quad(d \neq 0) $$
or
$$ \vec{r} \cdot \hat{n}-d \hat{n} \cdot \hat{n}=0 $$
$$ \begin{array}{ll} \text { i.e., } \quad \overrightarrow{\boldsymbol{r}} \cdot \hat{\boldsymbol{n}}=\boldsymbol{d} \quad(\text { as } \hat{n} \cdot \hat{n}=1) \tag{2} \end{array} $$
This is the vector form of the equation of the plane.
Cartesian form
Equation(2) gives the vector equation of a plane, where $\bar{k}$ is the unit vector normal to the plane. Let $\mathrm{P}(x, y, z)$ beany point on the plane. Then
$$ \overrightarrow{\mathrm{OP}}=x \hat{i}+y \hat{j}, z \hat{k} $$
Let $l, m, n$ be the direction cosines of $\hat{n}$. Then
$$ \hat{n}=l \hat{i}+m \hat{j}+n \hat{k} $$
Therefore, (2) gives
i.e.,
$$ (x \hat{i}+y \hat{j}, z \hat{k}).(l \hat{i}+m \hat{j}+n \hat{k})=d $$
$$ \begin{aligned} & l x+m y+n z=d \end{aligned} $$
This is the cartesian equation of the plane in the normal form.
- Note Equation (3) shows that if $r.(a \hat{i}+b \hat{j}+c \hat{k})$ isthe vect or equation of a plane, then $a x+b y+c z=d$ is the Cartesian equation of the plane, where $a, b$ and $c$ are the direction ratiosof the normal to the plane.
If $d$ is the distance from the origin and $l, m, n$ are the direction cosines of the normal to the plane through the origin, then the foot of the perpendicular is $(l d, m d, n d)$.
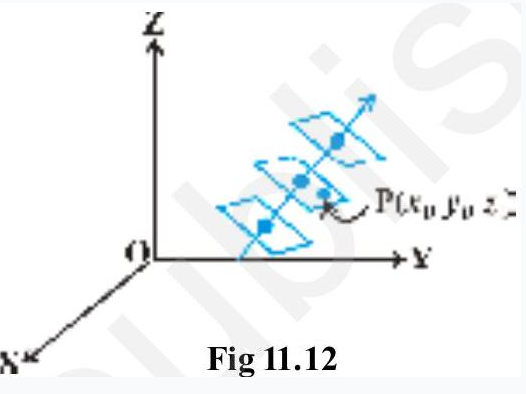
11.6.2 Equation of a plane perpendicular to a given vector and passing through a given point In the space, there can be many planes that are perpendicular to the given vector, but through a given point $\mathbf{P}\left(x_{1}, y_{1}, z_{1}\right.)$ , only one such plane exists (see Fig 11.12).
Let a plane pass through a point A with position vector $\vec{a}$ and perpendicularto the vector $\vec{N}$.
Let $\vec{r}$ bethe position vector of any point $\mathrm{P}(x, y, z)$ in the plane.(Fig11.13).
Then the point $\mathrm{P}$ lies in the plane if and only if $\overrightarrow{\mathrm{AP}}$ is perpendicular to $\overrightarrow{\mathrm{N}}$. i.e., $\overrightarrow{\mathrm{AP}} \cdot \overrightarrow{\mathrm{N}}=0$. But $\overrightarrow{\mathrm{AP}}=\vec{r}-\vec{a}$. Therefore, $(\overrightarrow{\boldsymbol{r}}-\overrightarrow{\boldsymbol{a}}) \cdot \overrightarrow{\mathbf{N}}=\mathbf{0}$
This is the vector equation of the plane.
Cartesian form
Let the given point Abe $\left(x_{1}, y_{1}, z_{1}\right), \mathrm{P}$ be $(x, y, z)$ and direction ratios of $\overrightarrow{\mathrm{N}}$ are A, B and C. Then,
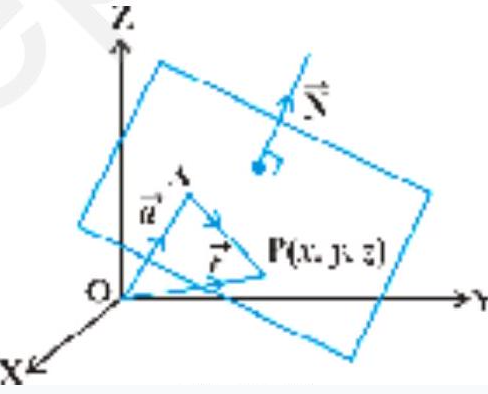
Fig 11.13
$$ \vec{a}=x_1 \hat{i}+y_1 \hat{j}+z_1 \hat{k}, \vec{r}=x \hat{i}+y \hat{j}+z \hat{k} \text { and } \overrightarrow{\mathrm{N}}=A\hat{i} +B\hat{j}+B\hat{k} $$
Now $$\quad(\vec{r}-\vec{a}) \cdot \overrightarrow{\mathrm{N}}=0$$ So $$\quad\left[\left(x-x_1\right) \hat{i}+\left(y-y_1\right) \hat{j}+\left(z-z_1\right) \hat{k}\right] \cdot(\mathrm{A} \hat{i}+\mathrm{B} \hat{j}+C \hat{k})=0$$ i.e. $$\quad \mathbf{A}\left(x-x_1\right)+\mathbf{B}\left(y-y_1\right)+\mathbf{C}\left(z-z_1\right)=\mathbf{0}$$
$$ \mathrm{A}\left(x-x_{1}\right)+\mathrm{B}\left(y-y_{1}\right)+\mathrm{C}\left(z-z_{1}\right)=0 $$
11.6.3 Equation of a plane passing through three non collinear points
Let $\mathrm{R}, \mathrm{S}$ and $\mathrm{T}$ be three non collinear pointson the plane with position vectors $\vec{a}, \vec{b}$ and $\vec{c}$ respectively (Fig 11.14).
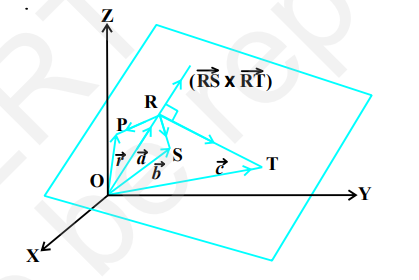
Fig 11.14 is
or
$$ \begin{array}{r} (\vec{r}-\vec{a}) \cdot(\overrightarrow{\mathrm{RS}} \times \overrightarrow{\mathrm{RT}})=0 \\ (\overrightarrow{\boldsymbol{r}}-\overrightarrow{\boldsymbol{a}}) \cdot[(\overrightarrow{\boldsymbol{b}}-\overrightarrow{\boldsymbol{a}}) \times(\overrightarrow{\boldsymbol{c}}-\overrightarrow{\boldsymbol{a}})]=\mathbf{0} \tag{1} \end{array} $$
This is the equation of the plane in vector form passing through three noncollinear points.
$\square$ Note Why wasit necessary to say that the three points hadto be non collinear? If the three points were on the same line, then there will be many planes that will contain them (Fig11.15).
These planeswill resemble the pages of a book where the line containing the pointsR, Sand T are membersin the binding of the book.
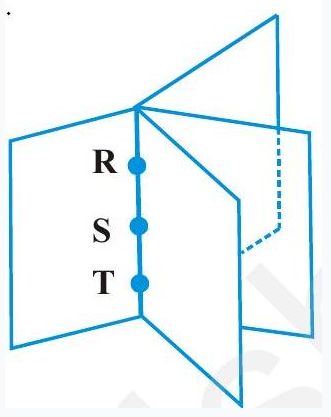
Fig 11.15
Cartesian form
Let $\left(x_{1}, y_{1}, z_{1}\right),\left(x_{2}, y_{2}, z_{2}\right)$ and $\left(x_{3}, y_{3}, z_{3}\right)$ be the coordinates of the points $\mathrm{R}, \mathrm{S}$ and $\mathrm{T}$ respectively. Let $(x, y, z)$ be the coordinates of any point $\mathrm{P}$ on the planewith position vector $\vec{r}$. Then
$$ \begin{aligned} & \overrightarrow{\mathrm{RP}}=\left(x-x_1\right) \hat{i}+\left(y-y_1\right) \hat{j}+\left(z-z_1\right) \hat{k} \end{aligned} $$
$$ \begin{aligned} & \overrightarrow{\mathrm{RS}}=\left(x_2-x_1\right) \hat{i}+\left(y_2-y_1\right) \hat{j}+\left(z_2-z_1\right) \hat{k} \end{aligned} $$
Substitutingthese valuesin equation (1) of thevector form and expressing it in the form of a determinant, we have
$$ \left|\begin{array}{lll} x-x_{1} & y-y_{1} & z-z_{1} \\ x_{2}-x_{1} & y_{2}-y_{1} & z_{2}-z_{1} \\ x_{3}-x_{1} & y_{3}-y_{1} & z_{3}-z_{1} \end{array}\right|=0 $$
which is the equation of the plane in Cartesian form passingthrough three non collinear points $\left(x_{1}, y_{1}, z_{1}\right),\left(x_{2}, y_{2}, z_{2}\right)$ and $\left(x_{3}, y_{3}, z_{3}\right)$.
11.6.4 Intercept form of the equation of a plane
In this section, we shall deduce the equation of a plane in termsof the intercepts made by the planeon the coordinate axes. Let the equation of the plane be
$$ \begin{equation*} \mathrm{A} x+\mathrm{B} y+\mathrm{Cz}+\mathrm{D}=0(\mathrm{D} \neq 0) \tag{1} \end{equation*} $$
Let the plane make intercepts $a, b, c$ on $x, y$ and $z$ axes, respectively (Fig 11.16).
Hence, the plane meets $x, y$ and $z$-axes at $(a, 0,0)$, $(0, b, 0),(0,0, c)$, respectively.
Therefore
$$ \begin{aligned} & \mathrm{A} a+\mathrm{D}=0 \text { or } \mathrm{A}=\frac{\mathrm{D}}{a} \\ & \mathrm{~B} b+\mathrm{D}=0 \text { or } \mathrm{B}=\frac{\mathrm{D}}{b} \\ & \mathrm{C} c+\mathrm{D}=0 \text { or } \mathrm{C}=\frac{\mathrm{D}}{c} \end{aligned} $$
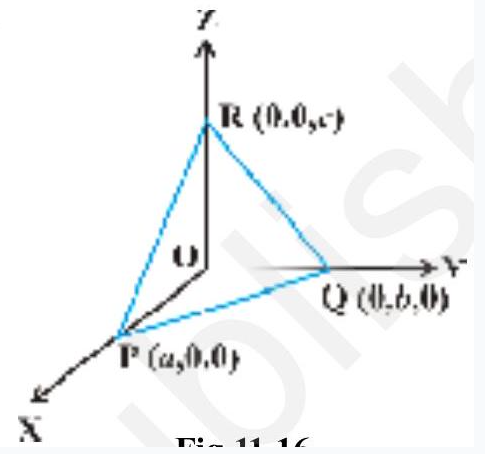
Fig 11.16
Substituting these values in the equation (1) of the plane and simplifying, weget
$$ \begin{equation*} \frac{x}{a}+\frac{y}{b}+\frac{z}{c}=1 \tag{1} \end{equation*} $$
which is the required equation of the plane in the intercept form.
11.6.5 Plane passing thro ugh the intersection of two given planes
Let $\pi_1$ and $\pi_2$ be two planes with equations $\vec{r} \bullet \hat{n}_1=d_1$ and $\vec{r} \bullet \hat{n}_2=d_2$ respectively. Theposition vector of any point on the line of intersection must satisfy both the equations(Fig 11.17).
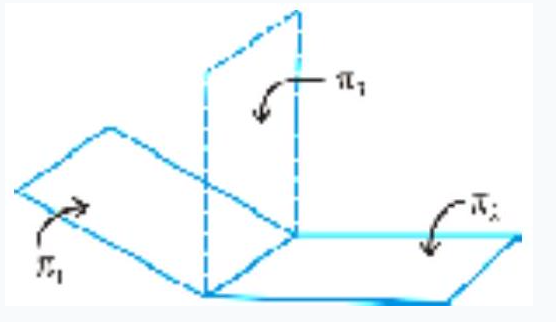
Fig 11.17
If $\vec{t}$ is the position vector of a point on the line, then
$$ \vec{t} \cdot \hat{n_1}=d_1 \quad \text{and} \quad \vec{t} \cdot \hat{n_2} d_{2} $$
Therefore, for all real values of $\lambda$, we have
$$ \vec{t} \cdot (\hat{n_1} + \lambda \hat{n_2})=d_1 + \lambda d_2 $$
Since $\vec{t}$ isarbitrary, it satisfies for any point on the line.
Hence, the equation $ \vec{t} \cdot (\hat{n_1} + \lambda \hat{n_2})=d_1 + \lambda d_2 $ represents a plane $\pi_{3}$ which is such that if any vector $\vec{r}$ satisfies both the equations $\pi_{1}$ and $\pi_{2}$, it also satisfies the equation $\pi_{3}$ i.e., any plane passingthrough the intersection of the planes
$$ \vec{r} \cdot \hat{n_1}=d_1 \quad \text{and} \quad \vec{r} \cdot \hat{n_2} d_{2} $$ has the equation $$ \vec{r} \cdot (\hat{n_1} + \lambda \hat{n_2})=d_1 + \lambda d_2 $$
Cartesian form
In Cartesian system, let
$$ \begin{aligned} \vec{n}_1 & =\mathrm{A}_1 \hat{i}+\mathrm{B}_2 \hat{j}+\mathrm{C}_1 \hat{k} \\ \vec{n}_2 & =\mathrm{A}_2 \hat{i}+\mathrm{B}_2 \hat{j}+\mathrm{C}_2 \hat{k} \\ \text { and } \quad \vec{r} & =x \hat{i}+y \hat{j}+z \hat{k} \end{aligned} $$ and Then (1) becomes $$ x\left(\mathrm{~A}_1+\lambda \mathrm{A}_2\right)+y\left(\mathrm{~B}_1+\lambda \mathrm{B}_2\right)+z\left(\mathrm{C}_1+\lambda \mathrm{C}_2\right)=d_1+\lambda d_2 $$ or $$ \left(\mathrm{A}_1 x+\mathrm{B}_1 y+\mathrm{C}_1 z-d_1\right)+\lambda\left(\mathrm{A}_2 x+\mathrm{B}_2 y+\mathrm{C}_2 z-d_2\right)=0 $$
which is the required Cartesian form of the equation of the plane passing through the intersection of the given planesfor each value of $\lambda$
11.7 Coplanarity of Two Lines
Let the given lines be $$ \begin{aligned} & \vec{r}=\vec{a}_1+\lambda \vec{b}_1 \\ & \vec{r}=\vec{a}_2+\mu \vec{b}_2 \end{aligned} $$ and Theline (1)passesthrough the point, say A, with position vect or $\vec{a}_1$ andisparallel to $\vec{b}_1$. The line (2) passes through the point, say $B$ with position vector $\vec{a}_2$ and is parallel to $\vec{b}_2$.
Thus, $$ \overrightarrow{\mathrm{AB}}=\vec{a}_2 \vec{a}_1 $$
The given lines are coplanar if and only if $\overrightarrow{\mathrm{AB}}$ is perpendicular to $\vec{b}_1 \times \vec{b}_2$. i.e. $$ \overrightarrow{\mathrm{AB}} \cdot\left(\vec{b}_1 \times \vec{b}_2\right)=0 \text { or }\left(\vec{a}_2-\vec{a}_1\right) \cdot\left(\vec{b}_1 \times \vec{b}_2\right)=0 $$
Cartesian form
Let $\left(x_{1}, y_{1}, z_{1}\right)$ and $\left(x_{2}, y_{2}, z_{2}\right)$ be the coordinates of the points $\mathrm{A}$ and $\mathrm{B}$ respectively.
Let $a_{1}, b_{1}, c_{1}$ and $a_{2}, b_{2}, c_{2}$ be the direction ratios of $\vec{b}{1}$ and $\vec{b}{2}$, respectively. Then
$$ \begin{aligned} & \left.\overrightarrow{\mathrm{AB}}=(x_2-\bar{x}_1\right) \hat{i}+\left(y_2-y_1\right) \hat{j}+\left(z_2-\bar{z}_1\right) \hat{k} \\ & \vec{b}_1=\bar{a}_1 \hat{i}+b_1 \hat{j}+c_1 \hat{k} \text { and } \vec{b}_2 \bar{a}_2 \hat{i}+b_2 \hat{j}+c_2 \hat{k} \end{aligned} $$
The given lines are coplanar if andonly if $\overrightarrow{\mathrm{AB}} \cdot\left(\vec{b}_1 \times \vec{b}_2\right)=0$. In the cart esian form, it can be expressed as
$$ \left|\begin{array}{ccc} x_2 x_1 & y_2 y_1 & z_2 z_1 \\ a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \end{array}\right| = 0 $$
11.8 Angle between Two Planes
Definition 2 The angle between two planes is defined as the angle between their normals (Fig 11.18 (a)). Observe that if $\theta$ is an angle bet ween the two planes, then so is 180 -$\theta$ (Fig 11.18 (b)). We shall take the acute angle as the angles between two planes.
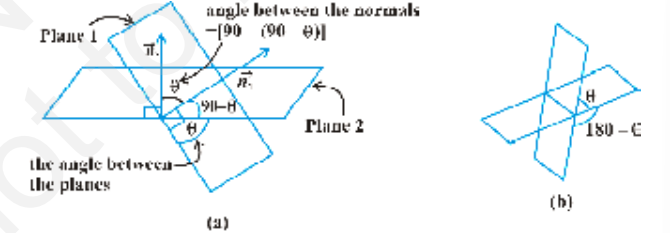
Fig 11.18
If $\vec{n_1}$ and $\vec{n}_{2}$ are normals to the planes and $\theta$ be the angle between the planes
$$ \vec{r} \cdot \vec{n_1}=d_1 \text { and } \vec{r} \cdot \vec{n_2}=d_2 $$
Then $\theta$ isthe angle between thenormals to the planes drawn from some common point.
We have,
$$ \cos \theta=\left|\frac{\vec{n_1} \cdot \vec{n_2}}{\left|\vec{n_1}\right|\left|\vec{n_2}\right|}\right| $$
Note The planes are perpendicular to each other if $\vec{n_1} \cdot \vec{n_2}=0$ and parallel if $\vec{n_1}$ is parallel to $\vec{n_2}$.
Cartesian form Let $\theta$ be the angle between the planes,
$$ \mathrm{A_1} x+\mathrm{B_1} y+\mathrm{C_1} z+\mathrm{D_1}=0 \text { and } \mathrm{A_2} x+\mathrm{B_2} y+\mathrm{C_2} z+\mathrm{D_2}=0 $$
The direction ratios of the normal to the planes are $A_{1}, B_{1}, C_{1}$ and $A_{2}, B_{2}, C_{2}$ respectively.
Therefore, $$ \cos \theta=\left|\frac{A_1 A_2+B_1B_2+C_1C_2}{\sqrt{A_1^2 + B_1^2+C_1^2}\sqrt{A_2^2 + B_2^2+C_2^2}}\right| $$
Note
1. If the planes are at right angles, then $\theta=90^{\circ}$ and so $\cos \theta=0$. Hence, $\cos \theta=\mathrm{A_1} \mathrm{~A_2}+\mathrm{B_1} \mathrm{~B_2}+\mathrm{C_1} \mathrm{C_2}=0$. 2. If the planesare parallel, then $\frac{A_{1}}{A_{2}}=\frac{B_{1}}{B_{2}}=\frac{C_{1}}{C_{2}}$.
11.9 Distance of a Point from a Plane
Vector form
Consider a point $\mathrm{P}$ with position vector $\vec{a}$ and a plane $\pi_{1}$ whose equation is $\vec{r} \cdot \hat{\mathbf{E}}=d$ (Fig 11.19).
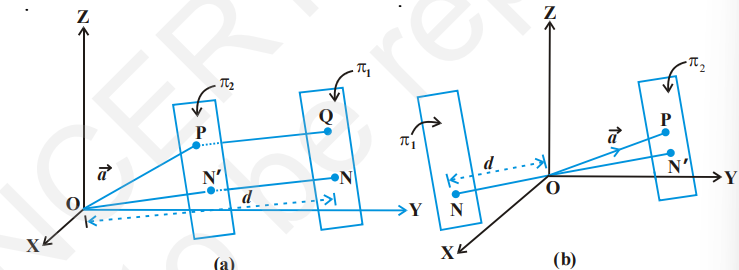
Fig 11.19
Consider a plane $\pi_{2}$ through $\mathrm{P}$ parallel to the plane $\pi_{1}$. The unit vector normal to $\pi_{2}$ is $\hat{n}$. Hence, its equation is $(\vec{r}-\vec{a}) \cdot \hat{n}=0$
i.e., $\quad \vec{r} \cdot \hat{n}=\vec{a} \cdot \hat{n}$
Thus, the distance ON’ of this plane from the origin is $| \vec{a} \cdot \hat{n}|$. Therefore, the distance PQ from the plane $\pi_{1}$ is (Fig. 11.21(a))
i.e.,
$$\mathrm{ON} \quad \mathrm{ON}^{\prime}=|d - \vec{a} \cdot \hat{n}|$$ which isthe length of the perpendicular from apoint to the given plane.
We may establish the similar results for (Fig 11.19(b)).
Note
1. If the equationof the plane $\pi_{2}$ is in the form $\vec{r} \cdot \overrightarrow{\mathrm{N}} \fallingdotseq d$, where $\overrightarrow{\mathrm{N}}$ isnormal to the plane, then the perpendicular distance is $\frac{|\vec{a} \cdot \overrightarrow{\mathrm{N}}-d|}{|\overrightarrow{\mathrm{N}}|}$. 2. The length of the perpendicular from origin Oto the plane $\vec{r} \cdot \overrightarrow{\mathrm{N}} \leftrightharpoons d$ is $\frac{|d|}{|\overrightarrow{\mathrm{N}}|}$ (since $\vec{a}=0$ ).
Cartesian form
Let $\mathrm{P}\left(x_{1}, y_{1}, z_{1}\right)$ bethe given point with position vector $\vec{a}$ and
$$ \mathrm{A} x+\mathrm{B} y+\mathrm{C} z=\mathrm{D} $$
be the Cartesian equation of the given plane. Then
$$ \begin{aligned} \vec{a} & =x_{1} \hat{i} +y_{1}\hat{j}+z_{1}\hat{k} \\ \overrightarrow{\mathrm{N}} & =\mathrm{A} \hat{i} + \mathrm{B} + \mathrm{C} \hat{k} \end{aligned} $$
Hence, from Note 1, the perpendicular from $P$ to the plane is
$$ \begin{aligned} & \left|\frac{(x_{1} \hat{i} +y_{1}\hat{j}+z_{1}\hat{k})\cdot(\mathrm{A} \hat{i} + \mathrm{B} + \mathrm{C} \hat{k})}{\sqrt{A^2+B^2+C^2}}\right| \end{aligned} $$
$$ \begin{aligned} =& \left|\frac{Ax_1+By_1+Cz_1-D}{\sqrt{A^2+B^2+C^2}}\right| \end{aligned} $$
11.10 Angle between a Line and a Plane
Definition 3 The angle between a line and aplane is the complement of the angle between the line and normal to the plane(Fig 11.20).
Vector form If the equation of the line is $\vec{r}=\vec{a}+\lambda \vec{b}$ and the equation of the plane is $\vec{r} \cdot \vec{n}=d$. Then the angle $\theta$ bet ween the line andthe
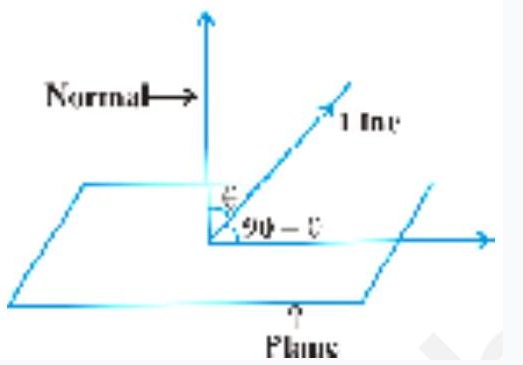
Fig 11.20 normalto the planeis
$$ \cos \theta=\left|\frac{\vec{b} \cdot \vec{n}}{|\vec{b}| \cdot|\vec{n}|}\right| $$
and so the angle $\phi$ bet ween the line and the plane is given by $90 \mathrm{i} \theta$, i.e.,
$$ \begin{aligned} \sin (90 - \theta) & =\cos \theta \ \sin \phi & =\left|\frac{\vec{b} \cdot \vec{n}}{|\vec{b}||\vec{n}|}\right| \text { or } \phi=\sin ^{i 1}\left|\frac{\bar{b} \cdot \bar{n}}{|\vec{b}||\bar{n}|}\right| \end{aligned} $$
i.e.
Summary
Direction cosines of a line are the cosines of the angles made by the line with the positive directions of the coordinate axes.
If $l, m, n$ are the direction cosines of a line, then $l^{2}+m^{2}+n^{2}=1$.
Direction cosines of a line joining two points $P(x_1, y_1, z_1)$ and $Q(x_2, y_2, z_2)$ are
$ \frac{x_2-x_1}{PQ}, \frac{y_2-y_1}{PQ}, \frac{z_2-z_1}{PQ} $
where $PQ=\sqrt{(x_2-x_1)^{2}+(y_2-y_1)^{2}+(z_2-z_1)^{2}}$
$\Delta$ Direction ratios of a line are the numbers which are proportional to the direction cosines of a line.
- If $l, m, n$ are the direction cosines and $a, b, c$ are the direction ratios of a line then
$ l=\frac{a}{\sqrt{a^{2}+b^{2}+c^{2}}} ; m=\frac{b}{\sqrt{a^{2}+b^{2}+c^{2}}} ; n=\frac{c}{\sqrt{a^{2}+b^{2}+c^{2}}} $
Skew lines are lines in space which are neither parallel nor intersecting. They lie in different planes.
- Angle between skew lines is the angle between two intersecting lines drawn from any point (preferably through the origin) parallel to each of the skew lines.
- If $l_1, m_1, n_1$ and $l_2, m_2, n_2$ are the direction cosines of two lines; and $\theta$ is the acute angle between the two lines; then
$ \cos \theta=|l_1 l_2+m_1 m_2+n_1 n_2| $
If $a_1, b_1, c_1$ and $a_2, b_2, c_2$ are the direction ratios of two lines and $\theta$ is the acute angle between the two lines; then
$ \cos \theta=|\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^{2}+b_1^{2}+c_1^{2}} \sqrt{a_2^{2}+b_2^{2}+c_2^{2}}}| $
Vector equation of a line that passes through the given point whose position vector is $\vec{a}$ and parallel to a given vector $\vec{b}$ is $\vec{r}=\vec{a}+\lambda \vec{b}$.
Equation of a line through a point $(x_1, y_1, z_1)$ and having direction cosines $l, m, n$ is
$ \frac{x-x_1}{l}=\frac{y-y_1}{m}=\frac{z-z_1}{n} $
- The vector equation of a line which passes through two points whose position vectors are $\vec{a}$ and $\vec{b}$ is $\vec{r}=\vec{a}+\lambda(\vec{b}-\vec{a})$.
$\Delta$ If $\theta$ is the acute angle between $\vec{r}= \vec{a} _ {1}+\lambda \vec{b} _ {1}$ and $\vec{r}= \vec{a} _ {2}+\lambda \vec{b} _ {2}$, then $\cos \theta=|\frac{ \vec{b} _ {1} \cdot \vec{b} _ {2}}{| \vec{b} _ {1}|| \vec{b} _ {2}|}|$
$\checkmark$ If $\frac{x-x_1}{l_1}=\frac{y-y_1}{m_1}=\frac{z-z_1}{n_1}$ and $\frac{x-x_2}{l_2}=\frac{y-y_2}{m_2}=\frac{z-z_2}{n_2}$
are the equations of two lines, then the acute angle between the two lines is given by $\cos \theta=|l_1 l_2+m_1 m_2+n_1 n_2|$.
- Shortest distance between two skew lines is the line segment perpendicular to both the lines.
Shortest distance between $\vec{r}= \vec{a} _ {1}+\lambda \vec{b} _ {1}$ and $\vec{r}= \vec{a} _ {2}+\mu \vec{b} _ {2}$ is
$ |\frac{( \vec{b} _ {1} \times \vec{b} _ {2}) \cdot( \vec{a} _ {2}- \vec{a} _ {1})}{| \vec{b} _ {1} \times \vec{b} _ {2}|}| $
Shortest distance between the lines: $\frac{x-x_1}{a_1}=\frac{y-y_1}{b_1}=\frac{z-z_1}{c_1}$ and
$ \frac{x-x_2}{a_2}=\frac{y-y_2}{b_2}=\frac{z-z_2}{c_2} \text{ is } $
$ \frac{ \begin{vmatrix} x_2-x_1 & y_2-y_1 & z_2-z_1 \\ a_1 & b_1 & c_1 \\ a_2 & b_2 & c_2 \end{vmatrix} }{\sqrt{(b_1 c_2-b_2 c_1)^{2}+(c_1 a_2-c_2 a_1)^{2}+(a_1 b_2-a_2 b_1)^{2}}} $
Distance between parallel lines $\vec{r}= \vec{a} _ {1}+\lambda \vec{b}$ and $\vec{r}= \vec{a} _ {2}+\mu \vec{b}$ is
$|\frac{\vec{b} \times( \vec{a} _ {2}- \vec{a} _ {1})}{|\vec{b}|}|$





