Chapter-05 Work, Energy, and Power
5.1 INTRODUCTION
The terms ‘work’, ’energy’ and ‘power’ are frequently used in everyday language. A farmer ploughing the field, a construction worker carrying bricks, a student studying for a competitive examination, an artist painting a beautiful landscape, all are said to be working. In physics, however, the word ‘Work’ covers a definite and precise meaning. Somebody who has the capacity to work for 14-16 hours a day is said to have a large stamina or energy. We admire a long distance runner for her stamina or energy. Energy is thus our capacity to do work. In Physics too, the term ’energy’ is related to work in this sense, but as said above the term ‘work’ itself is defined much more precisely. The word ‘power’ is used in everyday life with different shades of meaning. In karate or boxing we talk of ‘powerful’ punches. These are delivered at a great speed. This shade of meaning is close to the meaning of the word ‘power’ used in physics. We shall find that there is at best a loose correlation between the physical definitions and the physiological pictures these terms generate in our minds. The aim of this chapter is to develop an understanding of these three physical quantities. Before we proceed to this task, we need to develop a mathematical prerequisite, namely the scalar product of two vectors.
5.1.1 The Scalar Product
We have learnt about vectors and their use in Chapter 3. Physical quantities like displacement, velocity, acceleration, force etc. are vectors. We have also learnt how vectors are added or subtracted. We now need to know how vectors are multiplied. There are two ways of multiplying vectors which we shall come across : one way known as the scalar product gives a scalar from two vectors and the other known as the vector product produces a new vector from two vectors. We shall look at the vector product in Chapter 6. Here we take up the scalar product of two vectors. The scalar product or dot product of any two vectors A and B, denoted as A.B (read $\mathbf{A} \operatorname{dot} \mathbf{B}$) is defined as
$$ \begin{equation*} \mathbf{A} \cdot \mathbf{B}=A B \cos \theta \tag{5.1a} \end{equation*} $$
here $\theta$ is the angle between the two vectors as shown in Fig. 5.1(a). Since $A, B$ and $\cos \theta$ are scalars, the dot product of $\mathbf{A}$ and $\mathbf{B}$ is a scalar quantity. Each vector, $\mathbf{A}$ and $\mathbf{B}$, has a direction but their scalar product does not have a direction.
From Eq. (5.1a), we have
$$ \begin{aligned} \mathbf{A} \cdot \mathbf{B} & =A(B \cos \theta) \\ & =B(A \cos \theta) \end{aligned} $$
Geometrically, $B \cos \theta$ is the projection of $\mathbf{B}$ onto $\mathbf{A}$ in Fig.5.1 (b) and $A \cos \theta$ is the projection of $\mathbf{A}$ onto $\mathbf{B}$ in Fig. 5.1 (c). So, A.B is the product of the magnitude of $\mathbf{A}$ and the component of $\mathbf{B}$ along A. Alternatively, it is the product of the magnitude of $\mathbf{B}$ and the component of $\mathbf{A}$ along $\mathbf{B}$.
Equation (5.1a) shows that the scalar product follows the commutative law :
$\mathbf{A} \cdot \mathbf{B}=\mathbf{B} \cdot \mathbf{A}$
Scalar product obeys the distributive law:
$\mathbf{A} \cdot(\mathbf{B}+\mathbf{C})=\mathbf{A} \cdot \mathbf{B}+\mathbf{A} \cdot \mathbf{C}$
Further, $\quad \mathbf{A} \cdot(\lambda \mathbf{B})=\lambda(\mathbf{A} \cdot \mathbf{B})$
where $\lambda$ is a real number.
The proofs of the above equations are left to you as an exercise.
For unit vectors $\hat{\mathbf{i}}, \hat{\mathbf{j}}, \hat{\mathbf{k}}$ we have
$$ \begin{aligned} & \hat{\mathbf{i}} \cdot \hat{\mathbf{i}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=1 \\ & \hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{k}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{i}}=0 \end{aligned} $$
Given two vectors
$$ \begin{aligned} & \mathbf{A}=A_{x} \hat{\mathbf{i}}+A_{y} \hat{\mathbf{j}}+A_{z} \hat{\mathbf{k}} \\ & \mathbf{B}=B_{x} \hat{\mathbf{i}}+B_{y} \hat{\mathbf{j}}+B_{z} \hat{\mathbf{k}} \end{aligned} $$
their scalar product is
$$ \begin{align*} & \mathbf{A} \cdot \mathbf{B}=\left(A_{x} \hat{\mathbf{i}}+A_{y} \hat{\mathbf{j}}+A_{z} \hat{\mathbf{k}}\right) \cdot\left(B_{x} \hat{\mathbf{i}}+B_{y} \hat{\mathbf{j}}+B_{z} \hat{\mathbf{k}}\right) \\ & =A_{x} B_{x}+A_{y} B_{y}+A_{z} B_{z} \tag{5.1b} \end{align*} $$
From the definition of scalar product and (Eq. 5.1b) we have :
$$ \begin{equation*} \text{(i)} \quad \quad \quad \quad \mathbf{A} \cdot \mathbf{A}=A_{x} A_{x}+A_{y} A_{y}+A_{z} A_{z} \end{equation*} $$
$$\text{Or, } \quad\quad\quad\quad A^{2}=A_{x}^{2}+A_{y}^{2}+A_{z}^{2} \tag{5.1c}$$
since $\mathbf{A} \cdot \mathbf{A}=|\mathbf{A}||\mathbf{A}| \cos 0=A^{2}$.
(ii) $\mathbf{A} \cdot \mathbf{B}=0$, if $\mathbf{A}$ and $\mathbf{B}$ are perpendicular.
Example 5.1 Find the angle between force $\mathbf{F}=(3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}-5 \hat{\mathbf{k}})$ unit and displacement $\mathbf{d}=(5 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+3 \hat{\mathbf{k}})$ unit. Also find the projection of $\mathbf{F}$ on $\mathbf{d}$.
Answer $\mathbf{F} \cdot \mathbf{d}=F_{x} d_{x}+F_{y} d_{y}+F_{z} d_{z}$
$$ \begin{aligned} & =3(5)+4(4)+(-5)(3) \\ & =16 \text { unit } \end{aligned} $$
Hence $\mathbf{F} \cdot \mathbf{d}=F d \cos \theta=16$ unit
Now $\mathbf{F} \cdot \mathbf{F}$ $$ =F^{2}=F_{x}^{2}+F_{y}^{2}+F_{z}^{2} $$
$$ \begin{aligned} & =9+16+25 \\ & =50 \text { unit } \end{aligned} $$
and $\mathbf{d} \cdot \mathbf{d} \quad=d^{2}=d_{x}^{2}+d_{y}^{2}+d_{z}^{2}$
$$ =25+16+9 $$
$$ =50 \text { unit } $$
$\therefore \cos \theta=\frac{16}{\sqrt{50} \sqrt{50}}=\frac{16}{50}=0.32$,
$\theta=\cos ^{-1} 0.32$

Fig. 5.1 (a) The scalar product of two vectors A and B is a scalar : A.B = A B cos θ. (b) B cos θ is the projection of B onto A. (c) A cos θ is the projection of A onto B.
5.2 NOTIONS OF WORK AND KINETIC ENERGY: THE WORK-ENERGY THEOREM
The following relation for rectilinear motion under constant acceleration $a$ has been encountered in Chapter 3,
$$ \begin{equation*} v^{2}-u^{2}=2 a s \tag{5.2} \end{equation*} $$
where $u$ and $v$ are the initial and final speeds and $s$ the distance traversed. Multiplying both sides by $m / 2$, we have
$$ \begin{equation*} \frac{1}{2} m v^{2}-\frac{1}{2} m u^{2}=m a s=F s \tag{5.2a} \end{equation*} $$
where the last step follows from Newton’s Second Law. We can generalise Eq. (5.2) to three dimensions by employing vectors
$$ v^{2}-u^{2}=2 \text { a.d } $$
Here $\mathbf{a}$ and $\mathbf{d}$ are acceleration and displacement vectors of the object respectively. Once again multiplying both sides by $\mathrm{m} / 2$, we obtain
$$ \begin{equation*} \frac{1}{2} m v^{2}-\frac{1}{2} m u^{2}=m \mathbf{a} \cdot \mathbf{d}=\mathbf{F} . \mathbf{d} \tag{5.2b} \end{equation*} $$
The above equation provides a motivation for the definitions of work and kinetic energy. The left side of the equation is the difference in the quantity ‘half the mass times the square of the speed’ from its initial value to its final value. We call each of these quantities the ‘kinetic energy’, denoted by $K$. The right side is a product of the displacement and the component of the force along the displacement. This quantity is called ‘work’ and is denoted by W. Eq. (5.2b) is then
$$ \begin{equation*} K_{f}-K_{i}=W \tag{5.3} \end{equation*} $$
where $K_{i}$ and $K_{f}$ are respectively the initial and final kinetic energies of the object. Work refers to the force and the displacement over which it acts. Work is done by a force on the body over a certain displacement.
Equation (5.2) is also a special case of the work-energy (WE) theorem : The change in kinetic energy of a particle is equal to the work done on it by the net force. We shall generalise the above derivation to a varying force in a later section.
Example 5.2 It is well known that a raindrop falls under the influence of the downward gravitational force and the opposing resistive force. The latter is known to be proportional to the speed of the drop but is otherwise undetermined. Consider a drop of mass $1.00 \mathrm{~g}$ falling from a height $1.00 \mathrm{~km}$. It hits the ground with a speed of $50.0 \mathrm{~m} \mathrm{~s}^{-1}$. (a) What is the work done by the gravitational force? What is the work done by the unknown resistive force?
Answer (a) The change in kinetic energy of the drop is
$$ \begin{aligned} & \Delta K=\frac{1}{2} m v^{2}-0 \\ & =\frac{1}{2} \times 10^{-3} \times 50 \times 50 \\ & =1.25 \mathrm{~J} \end{aligned} $$
where we have assumed that the drop is initially at rest. Assuming that $g$ is a constant with a value $10 \mathrm{~m} / \mathrm{s}^{2}$, the work done by the gravitational force is,
$$ \begin{aligned} W_{g} & =m g h \\ & =10^{-3} \times 10 \times 10^{3} \\ & =10.0 \mathrm{~J} \end{aligned} $$
(b) From the work-energy theorem
$$ \Delta K=W_{g}+W_{r} $$
where $W_{r}$ is the work done by the resistive force on the raindrop. Thus
$$ \begin{aligned} W_{r} & =\Delta K-W_{g} \\ & =1.25-10 \\ & =-8.75 \mathrm{~J} \end{aligned} $$
is negative.
5.3 WORK
As seen earlier, work is related to force and the displacement over which it acts. Consider a constant force $\mathbf{F}$ acting on an object of mass $m$. The object undergoes a displacement $\mathbf{d}$ in the positive $x$-direction as shown in Fig. 5.2.

Fig. 5.2 An object undergoes a displacement d under the influence of the force F.
The work done by the force is defined to be the product of component of the force in the direction of the displacement and the magnitude of this displacement. Thus
$$ \begin{equation*} W=(F \cos \theta) d=\mathbf{F} \cdot \mathbf{d} \tag{5.4} \end{equation*} $$
We see that if there is no displacement, there is no work done even if the force is large. Thus, when you push hard against a rigid brick wall, the force you exert on the wall does no work. Yet your muscles are alternatively contracting and relaxing and internal energy is being used up and you do get tired. Thus, the meaning of work in physics is different from its usage in everyday language.
No work is done if :
(i) the displacement is zero as seen in the example above. A weightlifter holding a 150 $\mathrm{kg}$ mass steadily on his shoulder for $30 \mathrm{~s}$ does no work on the load during this time.
(ii) the force is zero. A block moving on a smooth horizontal table is not acted upon by a horizontal force (since there is no friction), but may undergo a large displacement.
(iii) the force and displacement are mutually perpendicular. This is so since, for $\theta=\pi / 2 \mathrm{rad}$ $\left(=90^{\circ}\right), \cos (\pi / 2)=0$. For the block moving on a smooth horizontal table, the gravitational force $m g$ does no work since it acts at right angles to the displacement. If we assume that the moon’s orbits around the earth is perfectly circular then the earth’s gravitational force does no work. The moon’s instantaneous displacement is tangential while the earth’s force is radially inwards and $\theta=\pi / 2$.
Work can be both positive and negative. If $\theta$ is between $0^{\circ}$ and $90^{\circ}, \cos \theta$ in Eq. (5.4) is positive. If $\theta$ is between $90^{\circ}$ and $180^{\circ}, \cos \theta$ is negative. In many examples the frictional force opposes displacement and $\theta=180^{\circ}$. Then the work done by friction is negative $\left(\cos 180^{\circ}=-1\right)$.
From Eq. (5.4) it is clear that work and energy have the same dimensions, $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$. The SI unit of these is joule (J), named after the famous British physicist James Prescott Joule (1811-1869). Since work and energy are so widely used as physical concepts, alternative units abound and some of these are listed in Table 5.1.
Table 5.1 Alternative Units of Work/Energy in $\mathrm{J}$
| erg | $10^{-7} \mathrm{~J}$ |
|---|---|
| electron volt (eV) | $1.6 \times 10^{-19} \mathrm{~J}$ |
| calorie (cal) | $4.186 \mathrm{~J}$ |
| kilowatt hour (kWh) | $3.6 \times 10^{6} \mathrm{~J}$ |
Example 5.3 A cyclist comes to a skidding stop in $10 \mathrm{~m}$. During this process, the force on the cycle due to the road is $200 \mathrm{~N}$ and is directly opposed to the motion. (a) How much work does the road do on the cycle? (b) How much work does the cycle do on the road?
Answer Work done on the cycle by the road is the work done by the stopping (frictional) force on the cycle due to the road.
(a) The stopping force and the displacement make an angle of $180^{\circ}$ ( $\pi \mathrm{rad}$) with each other. Thus, work done by the road,
$$ \begin{aligned} W_{r} & =F d \cos \theta \\ & =200 \times 10 \times \cos \pi \\ & =-2000 \mathrm{~J} \end{aligned} $$
It is this negative work that brings the cycle to a halt in accordance with WE theorem.
(b) From Newton’s Third Law an equal and opposite force acts on the road due to the cycle. Its magnitude is 200 N. However, the road undergoes no displacement. Thus, work done by cycle on the road is zero.
The lesson of Example 5.3 is that though the force on a body A exerted by the body $\mathrm{B}$ is always equal and opposite to that on B by A (Newton’s Third Law); the work done on A by B is not necessarily equal and opposite to the work done on $\mathrm{B}$ by $\mathrm{A}$.
5.4 KINETIC ENERGY
As noted earlier, if an object of mass $m$ has velocity $\mathbf{v}$, its kinetic energy $K$ is
$$ \begin{equation*} K=\frac{1}{2} m \mathbf{v} \cdot \mathbf{v}=\frac{1}{2} m v^{2} \tag{5.5} \end{equation*} $$
Table 5.2 Typical kinetic energies (K)
| Object | Mass (kg) | Speed $\left(\mathrm{m} \mathrm{s}^{-1}\right)$ | $\boldsymbol{K}(\mathbf{J})$ |
|---|---|---|---|
| Car | 2000 | 25 | $6.3 \times 10^{5}$ |
| Running athlete | 70 | 10 | $3.5 \times 10^{3}$ |
| Bullet | $5 \times 10^{-2}$ | 200 | $10^{3}$ |
| Stone dropped from $10 \mathrm{~m}$ | 1 | 14 | $10^{2}$ |
| Rain drop at terminal speed | $3.5 \times 10^{-5}$ | 9 | $1.4 \times 10^{-3}$ |
| Air molecule | $\simeq 10^{-26}$ | 500 | $\simeq 10^{-21}$ |
Kinetic energy is a scalar quantity. The kinetic energy of an object is a measure of the work an object can do by the virtue of its motion. This notion has been intuitively known for a long time. The kinetic energy of a fast flowing stream has been used to grind corn. Sailing ships employ the kinetic energy of the wind. Table 5.2 lists the kinetic energies for various objects.
Example 5.4 In a ballistics demonstration a police officer fires a bullet of mass $50.0 \mathrm{~g}$ with speed $200 \mathrm{~m} \mathrm{~s}^{-1}$ (see Table 5.2) on soft plywood of thickness $2.00 \mathrm{~cm}$. The bullet emerges with only $10 \%$ of its initial kinetic energy. What is the emergent speed of the bullet?
Answer The initial kinetic energy of the bullet is $m v^{2} / 2=1000 \mathrm{~J}$. It has a final kinetic energy of $0.1 \times 1000=100 \mathrm{~J}$. If $v_{f}$ is the emergent speed of the bullet,
$$ \begin{aligned} & \frac{1}{2} m v_{f}^{2}=100 \mathrm{~J} \\ & v_{f}=\sqrt{\frac{2 \times 100 \mathrm{~J}}{0.05 \mathrm{~kg}}} \\ & \quad=63.2 \mathrm{~m} \mathrm{~s}^{-1} \end{aligned} $$
The speed is reduced by approximately $68 \%$ (not 90 %).
5.5 WORK DONE BY A VARIABLE FORCE
A constant force is rare. It is the variable force, which is more commonly encountered. Fig. 5.3 is a plot of a varying force in one dimension.
If the displacement $\Delta x$ is small, we can take the force $F(x)$ as approximately constant and the work done is then
$$ \Delta W=F(x) \Delta x $$
This is illustrated in Fig. 5.3(a). Adding successive rectangular areas in Fig. 5.3(a) we get the total work done as
$$ \begin{equation*} W \cong \sum_{x_{i}}^{x_{f}} F(x) \Delta x \tag{5.6} \end{equation*} $$
where the summation is from the initial position $x_{i}$ to the final position $x_{f}$
If the displacements are allowed to approach zero, then the number of terms in the sum increases without limit, but the sum approaches a definite value equal to the area under the curve in Fig. 5.3(b). Then the work done is
$$W =\lim\limits_{\Delta x \rightarrow 0} \sum_{x_{i}}^{x_{f}} F(x) \Delta x$$
$$=\int\limits_{x_i}^{x_f} F(x) \mathrm{d} x \tag{5.7}$$
where ’lim’ stands for the limit of the sum when $\Delta x$ tends to zero. Thus, for a varying force the work done can be expressed as a definite integral of force over displacement (see also Appendix 3.1).

Fig. 5.3(a)

Fig. 5.3 (a) The shaded rectangle represents the work done by the varying force F(x), over the small displacement ∆x, ∆W = F(x) ∆x. (b) adding the areas of all the rectangles we find that for ∆x → 0, the area under the curve is exactly equal to the work done by F(x).
Example 5.5 A woman pushes a trunk on a railway platform which has a rough surface. She applies a force of $100 \mathrm{~N}$ over a distance of $10 \mathrm{~m}$. Thereafter, she gets progressively tired and her applied force reduces linearly with distance to $50 \mathrm{~N}$. The total distance through which the trunk has been moved is $20 \mathrm{~m}$. Plot the force applied by the woman and the frictional force, which is $50 \mathrm{~N}$ versus displacement. Calculate the work done by the two forces over $20 \mathrm{~m}$.
Answer

Fig. 5.4 Plot of the force F applied by the woman and the opposing frictional force f versus displacement.
The plot of the applied force is shown in Fig. 5.4. At $x=20 \mathrm{~m}, F=50 \mathrm{~N}(\neq 0)$. We are given that the frictional force $f$ is $|\mathbf{f}|=50 \mathrm{~N}$. It opposes motion and acts in a direction opposite to $\mathbf{F}$. It is therefore, shown on the negative side of the force axis.
The work done by the woman is
$W_{F} \rightarrow$ area of the rectangle $\mathrm{ABCD}+$ area of the trapezium CEID
$$ \begin{aligned} & W_{F}=100 \times 10+\frac{1}{2}(100+50) \times 10 \\ & =1000+750 \\ & \quad=1750 \mathrm{~J} \end{aligned} $$
The work done by the frictional force is
$W_{f} \rightarrow$ area of the rectangle AGHI
$$ \begin{aligned} W_{f} & =(-50) \times 20 \\ & =-1000 \mathrm{~J} \end{aligned} $$
The area on the negative side of the force axis has a negative sign.
5.6 THE WORK-ENERGY THEOREM FOR A VARIABLE FORCE
We are now familiar with the concepts of work and kinetic energy to prove the work-energy theorem for a variable force. We confine ourselves to one dimension. The time rate of change of kinetic energy is
$$ \frac{\mathrm{d} K}{\mathrm{~d} t}=\frac{\mathrm{d}}{\mathrm{d} t} \frac{1}{2} m v^{2} $$ $$ \begin{aligned} & =m \frac{\mathrm{d} v}{\mathrm{~d} t} v \\ & =F v\text { (from Newton’s Second Law) } \\ & =F \frac{\mathrm{d} x}{\mathrm{~d} t} \end{aligned} $$
Thus
$$ \mathrm{d} K=F \mathrm{~d} x $$
Integrating from the initial position $\left(x_{i}\right)$ to final position $\left(x_{f}\right.$ ), we have
$$ \int_{K_{i}}^{K_{f}} \mathrm{~d} K=\int_{x_{i}}^{x_{f}} F \mathrm{~d} x $$
where, $K_{i}$ and $K_{f}$ are the initial and final kinetic energies corresponding to $x_{i}$ and $x_{\mathrm{f}}$.
$$ \begin{equation*} \text { or } \quad K_{f}-K_{i}=\int_{x_{i}}^{x_{f}} F \mathrm{~d} x \tag{5.8a} \end{equation*} $$
From Eq. (5.7), it follows that
$$ \begin{equation*} K_{f}-K_{i}=W \tag{5.8b} \end{equation*} $$
Thus, the WE theorem is proved for a variable force.
While the WE theorem is useful in a variety of problems, it does not, in general, incorporate the complete dynamical information of Newton’s second law. It is an integral form of Newton’s second law. Newton’s second law is a relation between acceleration and force at any instant of time. Work-energy theorem involves an integral over an interval of time. In this sense, the temporal (time) information contained in the statement of Newton’s second law is ‘integrated over’ and is not available explicitly. Another observation is that Newton’s second law for two or three dimensions is in vector form whereas the work-energy theorem is in scalar form. In the scalar form, information with respect to directions contained in Newton’s second law is not present.
Example 5.6 A block of mass $m=1 \mathrm{~kg}$, moving on a horizontal surface with speed $V_{i}=2 \mathrm{~m} \mathrm{~s}^{-1}$ enters a rough patch ranging from $X=0.10 \mathrm{~m}$ to $X=2.01 \mathrm{~m}$. The retarding force $F_{r}$ on the block in this range is inversely proportional to $x$ over this range,
$F_{r}=\frac{-k}{x}$ for $0.1<x<2.01 \mathrm{~m}$
$=0$ for $x<0.1 \mathrm{~m}$ and $x>2.01 \mathrm{~m}$
where $k=0.5 \mathrm{~J}$. What is the final kinetic energy and speed $v_{f}$ of the block as it crosses this patch?
Answer From Eq. (5.8a)
$$ \begin{aligned} K _{f} & =K _{i}+\int _{0.1}^{2.01} \frac{(-k)}{x} \mathrm{~d} x \\ & =\frac{1}{2} m v _{i}^{2}-\left.k \ln (x)\right| _{0.1} ^{2.01} \\ & =\frac{1}{2} m v _{i}^{2}-k \ln (2.01 / 0.1) \\ = & 2-0.5 \ln (20.1) \\ = & -1.5=0.5 \mathrm{~J} \\ \end{aligned}$$
$$ \begin{aligned} v _{f} & =\sqrt{2 K _{f} / m}=1 \mathrm{~m} \mathrm{~s}^{-1} \end{aligned} $$
Here, note that $\ln$ is a symbol for the natural logarithm to the base $e$ and not the logarithm to the base $10\left[\ln X=\log _{e} X=2.303 \log _{10} X\right]$.
5.7 THE CONCEPT OF POTENTIAL ENERGY
The word potential suggests possibility or capacity for action. The term potential energy brings to one’s mind ‘stored’ energy. A stretched bow-string possesses potential energy. When it is released, the arrow flies off at a great speed. The earth’s crust is not uniform, but has discontinuities and dislocations that are called fault lines. These fault lines in the earth’s crust are like ‘compressed springs’. They possess a large amount of potential energy. An earthquake results when these fault lines readjust. Thus, potential energy is the ‘stored energy’ by virtue of the position or configuration of a body. The body left to itself releases this stored energy in the form of kinetic energy. Let us make our notion of potential energy more concrete.
The gravitational force on a ball of mass $m$ is $m g$. gmay be treated as a constant near the earth surface. By ’near’ we imply that the height $h$ of the ball above the earth’s surface is very small compared to the earth’s radius $R_{E}\left(h«R_{E}\right)$ so that we can ignore the variation of $g$ near the earth’s surface*. In what follows we have taken the upward direction to be positive. Let us raise the ball up to a height $h$. The work done by the external agency against the gravitational force is $m g h$. This work gets stored as potential energy. Gravitational potential energy of an object, as a function of the height $h$, is denoted by $V(h)$ and it is the negative of work done by the gravitational force in raising the object to that height.
$$ V(h)=m g h $$
If $h$ is taken as a variable, it is easily seen that the gravitational force $F$ equals the negative of the derivative of $V(h)$ with respect to $h$. Thus,
$$ F=-\frac{\mathrm{d}}{\mathrm{d} h} V(h)=-m g $$
The negative sign indicates that the gravitational force is downward. When released, the ball comes down with an increasing speed. Just before it hits the ground, its speed is given by the kinematic relation,
$$ v^{2}=2 g h $$
This equation can be written as
$$ \frac{1}{2} m v^{2}=m g h $$
which shows that the gravitational potential energy of the object at height $h$, when the object is released, manifests itself as kinetic energy of the object on reaching the ground.
Physically, the notion of potential energy is applicable only to the class of forces where work done against the force gets ‘stored up’ as energy. When external constraints are removed, it manifests itself as kinetic energy. Mathematically, (for simplicity, in one dimension) the potential energy $V(x)$ is defined if the force $F(x)$ can be written as
$$ F(x)=-\frac{\mathrm{d} V}{\mathrm{~d} x} $$
This implies that
$$ \int_{x_{i}}^{x_{f}} F(x) \mathrm{d} x=-\int_{V_{i}}^{V_{f}} \mathrm{~d} V=V_{i}-V_{f} $$
The work done by a conservative force such as gravity depends on the initial and final positions only. In the previous chapter we have worked on examples dealing with inclined planes. If an object of mass $m$ is released from rest, from the top of a smooth (frictionless) inclined plane of height $h$, its speed at the bottom is $\sqrt{2 g h}$ irrespective of the angle of inclination. Thus, at the bottom of the inclined plane it acquires a kinetic energy, mgh. If the work done or the kinetic energy did depend on other factors such as the velocity or the particular path taken by the object, the force would be called nonconservative.
The dimensions of potential energy are $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ and the unit is joule $(\mathrm{J})$, the same as kinetic energy or work. To reiterate, the change in potential energy, for a conservative force, $\Delta V$ is equal to the negative of the work done by the force
$$ \begin{equation*} \Delta V=-F(x) \Delta x \tag{5.9} \end{equation*} $$
In the example of the falling ball considered in this section we saw how potential energy was converted to kinetic energy. This hints at an important principle of conservation in mechanics, which we now proceed to examine.
5.8 THE CONSERVATION OF MECHANICAL ENERGY
For simplicity we demonstrate this important principle for one-dimensional motion. Suppose that a body undergoes displacement $\Delta x$ under the action of a conservative force $F$. Then from the WE theorem we have,
$$ \Delta K=F(x) \Delta x $$
If the force is conservative, the potential energy function $V(x)$ can be defined such that
$$ -\Delta V=F(x) \Delta x $$
The above equations imply that
$$ \begin{align*} & \Delta K+\Delta V=0 \\ & \Delta(K+V)=0 \tag{5.10} \end{align*} $$
which means that $K+V$, the sum of the kinetic and potential energies of the body is a constant. Over the whole path, $x_{i}$ to $x_{f}$, this means that
$$ \begin{equation*} K_{i}+V\left(x_{i}\right)=K_{f}+V\left(x_{f}\right) \tag{5.11} \end{equation*} $$
The quantity $K+V(x)$, is called the total mechanical energy of the system. Individually the kinetic energy $K$ and the potential energy $V(x)$ may vary from point to point, but the sum is a constant. The aptness of the term ‘conservative force’ is now clear.
Let us consider some of the definitions of a conservative force.
- A force $F(x)$ is conservative if it can be derived from a scalar quantity $V(x)$ by the relation given by Eq. (5.9). The three-dimensional generalisation requires the use of a vector derivative, which is outside the scope of this book.
- The work done by the conservative force depends only on the end points. This can be seen from the relation,which depends on the end points.
$$ W=K_{f}-K_{i}=V\left(x_{i}\right)-V\left(x_{f}\right) $$
- A third definition states that the work done by this force in a closed path is zero.
This is once again apparent from Eq. (5.11) since $x_{i}=x_{f}$.
Thus, the principle of conservation of total mechanical energy can be stated as
The total mechanical energy of a system is conserved if the forces, doing work on it, are conservative. The above discussion can be made more concrete by considering the example of the gravitational force once again and that of the spring force in the next section. Fig. 5.5 depicts a ball of mass $m$ being dropped from a cliff of height $H$.

Fig. 5.5 The conversion of potential energy to kinetic energy for a ball of mass m dropped from a height H.
The total mechanical energies $E_{0}, E_{h}$, and $E_{H}$ of the ball at the indicated heights zero (ground level), $h$ and $H$, are
$$ \begin{align*} E_H & =m g H \tag{5.11a}\\ E_h & =m g h + \frac{1}{2} mv_h^2 \\ \end{align*} $$
$$ \begin{align*} E_o & =(1 / 2) mv_f^2 \tag{5.11c}\\ \end{align*} $$
The constant force is a special case of a spatially dependent force $F(x)$. Hence, the mechanical energy is conserved. Thus
$$ E _{\mathrm{H}}=E _{0} $$ अथवा, $m g H=\frac{1}{2} m v _{f}^{2}$
$$ v _{f}=\sqrt{2 g H} $$
a result that was obtained in section 5.7 for a freely falling body. Further,
$$ E_{H}=E_{h} $$
which implies,
$$ \begin{equation*} v_{\mathrm{h}}^{2}=2 g(H-h) \tag{5.11~d} \end{equation*} $$
and is a familiar result from kinematics.
At the height $H$, the energy is purely potential. It is partially converted to kinetic at height $h$ and is fully kinetic at ground level. This illustrates the conservation of mechanical energy.
Example 5.7 A bob of mass $m$ is suspended by a light string of length $L$. It is imparted a horizontal velocity $V_{o}$ at the lowest point A such that it completes a semi-circular trajectory in the vertical plane with the string becoming slack only on reaching the topmost point, C. This is shown in Fig. 5.6. Obtain an expression for (i) $V_{o}$; (ii) the speeds at points $\mathrm{B}$ and $\mathrm{C}$; (iii) the ratio of the kinetic energies $\left(K_{B} / K_{C}\right)$ at B and C. Comment on the nature of the trajectory of the bob after it reaches the point $\mathrm{C}$.
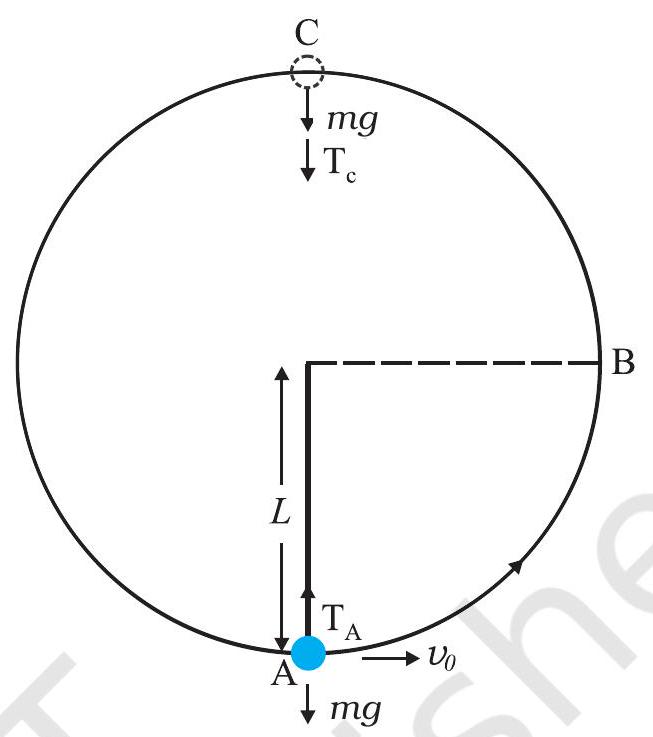
Fig. 5.6
Answer (i) There are two external forces on the bob : gravity and the tension $(T)$ in the string. The latter does no work since the displacement of the bob is always normal to the string. The potential energy of the bob is thus associated with the gravitational force only. The total mechanical energy $E$ of the system is conserved. We take the potential energy of the system to be zero at the lowest point $A$. Thus, at $A$ :
$$ \begin{equation*} E=\frac{1}{2} m v_{O}^{2} \tag{5.12} \end{equation*} $$
$$ T_{A}-m g=\frac{m v_{0}^{2}}{L} \text { [Newton’s Second Law] } $$
where $T_{A}$ is the tension in the string at A. At the highest point $\mathrm{C}$, the string slackens, as the tension in the string $\left(T_{C}\right)$ becomes zero. Thus, at $\mathrm{C}$
$$
\begin{aligned}
& E=\frac{1}{2} m v_{c}^{2}+2 m g {L}
{5.13}\\
\end{aligned}
$$
$$ \begin{aligned} & m g=\frac{m v_{c}^{2}}{L} \quad \text { [Newton’s Second Law] } {5.14} \end{aligned} $$
where $v_{C}$ is the speed at C. From Eqs. (5.13) and (5.14)
$$ E=\frac{5}{2} m g L $$
Equating this to the energy at A
$$ \frac{5}{2} m g L=\frac{m}{2} v_{o}^{2} $$
or, $v_{0}=\sqrt{5 g L}$
(ii) It is clear from Eq. (5.14)
$$ v_{C}=\sqrt{g L} $$
At $\mathrm{B}$, the energy is
$$ E=\frac{1}{2} m v_{B}^{2}+m g L $$
Equating this to the energy at A and employing the result from (i), namely $v_{0}^{2}=5 g L$,
$$ \begin{aligned} & \frac{1}{2} m v_{B}^{2}+m g L=\frac{1}{2} m v_{O}^{2} \ & =\frac{5}{2} m g L \end{aligned} $$
$$ \therefore v_{B}=\sqrt{3 g L} $$
(iii) The ratio of the kinetic energies at $\mathrm{B}$ and $\mathrm{C}$ is :
$$ \frac{K_{B}}{K_{C}}=\frac{\frac{1}{2} m v_{B}^{2}}{\frac{1}{2} m v_{C}^{2}}=\frac{3}{1} $$
At point $\mathrm{C}$, the string becomes slack and the velocity of the bob is horizontal and to the left. If the connecting string is cut at this instant, the bob will execute a projectile motion with horizontal projection akin to a rock kicked horizontally from the edge of a cliff. Otherwise the bob will continue on its circular path and complete the revolution.
5.9 THE POTENTIAL ENERGY OF A SPRING
The spring force is an example of a variable force which is conservative. Fig. 5.7 shows a block attached to a spring and resting on a smooth horizontal surface. The other end of the spring is attached to a rigid wall. The spring is light and may be treated as massless. In an ideal spring, the spring force $F_{s}$ is proportional to $x$ where $x$ is the displacement of the block from the equilibrium position. The displacement could be either positive [Fig. 5.7(b)] or negative [Fig. 5.7(c)]. This force law for the spring is called Hooke’s law and is mathematically stated as
$$ F_{s}=-k x $$
The constant $k$ is called the spring constant. Its unit is $\mathrm{N} \mathrm{m}^{-1}$. The spring is said to be stiff if $k$ is large and soft if $k$ is small.
Suppose that we pull the block outwards as in Fig. 5.7(b). If the extension is $x_{m}$, the work done by the spring force is
$$ \begin{align*} W & =\int _{0}^{x _{m}} F _{s} \mathrm{~d} x=-\int _{0}^{x _{m}} k x \mathrm{~d} x \\ & =-\frac{k x _{m}^{2}}{2} \tag{5.15} \end{align*} $$
This expression may also be obtained by considering the area of the triangle as in Fig. 5.7(d). Note that the work done by the external pulling force $F$ is positive since it overcomes the spring force.
$$ \begin{equation*} W=+\frac{k x_{m}^{2}}{2} \tag{5.16} \end{equation*} $$

Fig. 5.7 Illustration of the spring force with a block attached to the free end of the spring. (a) The spring force Fs is zero when the displacement x from the equilibrium position is zero. (b) For the stretched spring x > 0 and Fs < 0 (c) For the compressed spring x < 0 and Fs > 0.(d) The plot of Fs versus x. The area of the shaded triangle represents the work done by the spring force. Due to the opposing signs of Fs and x, this work done is negative, W kx / s m 2 = − 2.
The same is true when the spring is compressed with a displacement $x_{c}(<0)$. The spring force does work $W_{s}=-k x_{c}^{2} / 2$ while the external force $F$ does work $+k x_{c}^{2} / 2$. If the block is moved from an initial displacement $x_{i}$ to a final displacement $x_{f}$, the work done by the spring force $W_{s}$ is
$$ \begin{equation*} W_{s}=-\int_{x_{i}}^{x_{f}} k x \mathrm{~d} x=\frac{k x_{i}^{2}}{2}-\frac{k x_{f}^{2}}{2} \tag{5.17} \end{equation*} $$
Thus the work done by the spring force depends only on the end points. Specifically, if the block is pulled from $x_{i}$ and allowed to return to $x_{i}$;
$$ \begin{align*} W_{s} & =-\int_{x_{i}}^{x_{i}} k x \mathrm{~d} x=\frac{k x_{i}^{2}}{2}-\frac{k x_{i}^{2}}{2} \ & =0 \tag{5.18} \end{align*} $$
The work done by the spring force in a cyclic process is zero. We have explicitly demonstrated that the spring force (i) is position dependent only as first stated by Hooke, $\left(F_{s}=-k x\right)$; (ii) does work which only depends on the initial and final positions, e.g. Eq. (5.17). Thus, the spring force is a conservative force.
We define the potential energy $V(x)$ of the spring to be zero when block and spring system is in the equilibrium position. For an extension (or compression) $x$ the above analysis suggests that
$$ \begin{align*} V(x)=\frac{k x^{2}}{2} \tag{5.19} \end{align*} $$
You may easily verify that $-\mathrm{d} V / \mathrm{d} x=-k x$, the spring force. If the block of mass $m$ in Fig. 5.7 is extended to $x_{m}$ and released from rest, then its total mechanical energy at any arbitrary point $x$, where $x$ lies between $-x_{m}$ and $+x_{m}$, will be given by
$$ \frac{1}{2} k x_{m}^{2}=\frac{1}{2} k x^{2}+\frac{1}{2} m v^{2} $$
where we have invoked the conservation of mechanical energy. This suggests that the speed and the kinetic energy will be maximum at the equilibrium position, $x=0$, i.e.,
$$ \frac{1}{2} m v_{m}^{2}=\frac{1}{2} k x_{m}^{2} $$
where $v_{m}$ is the maximum speed.
or $\quad v_{m}=\sqrt{\frac{k}{m}} x_{m}$
Note that $k / m$ has the dimensions of $\left[\mathrm{T}^{-2}\right]$ and our equation is dimensionally correct. The kinetic energy gets converted to potential energy and vice versa, however, the total mechanical energy remains constant. This is graphically depicted in Fig. 5.8.

Fig. 5.8 Parabolic plots of the potential energy V and kinetic energy K of a block attached to a spring obeying Hooke’s law. The two plots are complementary, one decreasing as the other increases. The total mechanical energy E = K + V remains constant
Example 5.8 To simulate car accidents, auto manufacturers study the collisions of moving cars with mounted springs of different spring constants. Consider a typical simulation with a car of mass $1000 \mathrm{~kg}$ moving with a speed $18.0 \mathrm{~km} / \mathrm{h}$ on a smooth road and colliding with a horizontally mounted spring of spring constant $5.25 \times 10^{3} \mathrm{~N} \mathrm{~m}^{-1}$. What is the maximum compression of the spring ?
Answer At maximum compression the kinetic energy of the car is converted entirely into the potential energy of the spring. The kinetic energy of the moving car is
$$ \begin{aligned} & K=\frac{1}{2} m v^{2} \\ & =\frac{1}{2} \times 10^{3} \times 5 \times 5 \\ & K=1.25 \times 10^{4} \mathrm{~J} \end{aligned} $$
where we have converted $18 \mathrm{~km} \mathrm{~h}^{-1}$ to $5 \mathrm{~m} \mathrm{~s}^{-1}$ [It is useful to remember that $36 \mathrm{~km} \mathrm{~h}^{-1}=10 \mathrm{~m} \mathrm{~s}^{-1}$ ]. At maximum compression $x_{m}$, the potential energy $V$ of the spring is equal to the kinetic energy $K$ of the moving car from the principle of conservation of mechanical energy.
$$ \begin{aligned} V & =\frac{1}{2} k x _{m}^{2} \\ & =1.25 \times 10^{4} \mathrm{~J} \end{aligned} $$
We note that we have idealised the situation. The spring is considered to be massless. The surface has been considered to possess negligible friction.
We conclude this section by making a few remarks on conservative forces.
(i) Information on time is absent from the above discussions. In the example considered above, we can calculate the compression, but not the time over which the compression occurs. A solution of Newton’s Second Law for this system is required for temporal information.
(ii) Not all forces are conservative. Friction, for example, is a non-conservative force. The principle of conservation of energy will have to be modified in this case. This is illustrated in Example 5.9.
(iii) The zero of the potential energy is arbitrary. It is set according to convenience. For the spring force we took $V(x)=0$, at $x=0$, i.e. the unstretched spring had zero potential energy. For the constant gravitational force $m g$, we took $V=0$ on the earth’s surface. In a later chapter we shall see that for the force due to the universal law of gravitation, the zero is best defined at an infinite distance from the gravitational source. However, once the zero of the potential energy is fixed in a given discussion, it must be consistently adhered to throughout the discussion. You cannot change horses in midstream !
Example 5.9 Consider Example 5.8 taking the coefficient of friction, $\mu$, to be 0.5 and calculate the maximum compression of the spring.
Answer In presence of friction, both the spring force and the frictional force act so as to oppose the compression of the spring as shown in Fig. 5.9.

Fig. 5.9 The forces acting on the car.
We invoke the work-energy theorem, rather than the conservation of mechanical energy.
The change in kinetic energy is
$$ \Delta K=K_{f}-K_{i}=0-\frac{1}{2} m v^{2} $$
The work done by the net force is
$$ W=-\frac{1}{2} k x_{m}^{2}-\mu m g x_{m} $$
Equating we have
$$ \frac{1}{2} m v^{2}=\frac{1}{2} k x_{m}^{2}+\mu m g x_{m} $$
Now $\mu m g=0.5 \times 10^{3} \times 10=5 \times 10^{3} \mathrm{~N}$ (taking $g=10.0 \mathrm{~m} \mathrm{~s}^{-2}$ ). After rearranging the above equation we obtain the following quadratic equation in the unknown $x_{m}$.
$$ \begin{aligned} & k x_{m}^{2}+2 \mu m g x_{m}-m v^{2}=0 \\ \\ & x_{m}=\frac{-\mu m g+\left[\mu^{2} m^{2} g^{2}+m k v^{2}\right]^{1 / 2}}{k} \end{aligned} $$
where we take the positive square root since $x_{m}$ is positive. Putting in numerical values we obtain
$$ x_{m}=1.35 \mathrm{~m} $$
which, as expected, is less than the result in Example 5.8.
If the two forces on the body consist of a conservative force $F_{c}$ and a non-conservative force $F_{n c}$, the conservation of mechanical energy formula will have to be modified. By the WE theorem
$$ \begin{aligned} &\left(F_{c}+F_{n c}\right) \Delta x=\Delta K \\ \text{but } \quad \quad &F_{c} \Delta x=-\Delta V \\ \text{Hence, } \quad \quad&\Delta(K+V)=F_{n c} \Delta \\ &\Delta E=F_{n c} \Delta x \end{aligned} $$
where $E$ is the total mechanical energy. Over the path this assumes the form
$$ E_{f}-E_{i}=W_{n c} $$
where $W_{n c}$ is the total work done by the non-conservative forces over the path. Note that unlike the conservative force, $W_{n c}$ depends on the particular path $i$ to $f$.
5.10 POWER
Often it is interesting to know not only the work done on an object, but also the rate at which this work is done. We say a person is physically fit if he not only climbs four floors of a building but climbs them fast. Power is defined as the time rate at which work is done or energy is transferred. The average power of a force is defined as the ratio of the work, $W$, to the total time $t$ taken
$$ P_{a v}=\frac{W}{t} $$
The instantaneous power is defined as the limiting value of the average power as time interval approaches zero,
$$ \begin{equation*} P=\frac{\mathrm{d} W}{\mathrm{~d} t} \tag{5.20} \end{equation*} $$
The work $d W$ done by a force $\mathrm{F}$ for a displacement $d \mathbf{r}$ is $\mathrm{d} W=\mathbf{F} . d \mathbf{r}$. The instantaneous power can also be expressed as
$$ \begin{align*} & P=\mathbf{F} \cdot \frac{\mathrm{d} \boldsymbol{r}}{\mathrm{d} t} \\ = & \mathbf{F} \cdot \mathbf{v} \tag{5.21} \end{align*} $$
where $\mathbf{v}$ is the instantaneous velocity when the force is $\mathbf{F}$.
Power, like work and energy, is a scalar quantity. Its dimensions are $\left[\mathrm{ML}^{2} \mathrm{~T}^{-3}\right]$. In the SI, its unit is called a watt (W). The watt is $1 \mathrm{~J} \mathrm{~s}^{-1}$. The unit of power is named after James Watt, one of the innovators of the steam engine in the eighteenth century.
There is another unit of power, namely the horse-power (hp)
$$ 1 \mathrm{hp}=746 \mathrm{~W} $$
This unit is still used to describe the output of automobiles, motorbikes, etc.
We encounter the unit watt when we buy electrical goods such as bulbs, heaters and refrigerators. A 100 watt bulb which is on for 10 hours uses 1 kilowatt hour ( $\mathrm{kWh}$ ) of energy.
$$ \begin{aligned} & 100(\text { watt }) \times 10(\text { hour }) \\ & =1000 \text { वाट-घंटा } \\ & =1 \text { kilowatt hour }(\mathrm{kWh}) \\ & =10^{3}(\mathrm{~W}) \times 3600(\mathrm{~s}) \\ & =3.6 \times 10^{6} \mathrm{~J} \end{aligned} $$
Our electricity bills carry the energy consumption in units of $\mathrm{kWh}$. Note that $\mathrm{kWh}$ is a unit of energy and not of power.
Example 5.10 An elevator can carry a maximum load of $1800 \mathrm{~kg}$ (elevator + passengers) is moving up with a constant speed of $2 \mathrm{~m} \mathrm{~s}^{-1}$. The frictional force opposing the motion is 4000 N. Determine the minimum power delivered by the motor to the elevator in watts as well as in horse power.
Answer The downward force on the elevator is
$$ F=m g+F_{f}=(1800 \times 10)+4000=22000 \mathrm{~N} $$
The motor must supply enough power to balance this force. Hence,
$$ P=\mathbf{F} \cdot \mathbf{v}=22000 \times 2=44000 \mathrm{~W}=59 \mathrm{hp} $$
5.11 COLLISIONS
In physics we study motion (change in position). At the same time, we try to discover physical quantities, which do not change in a physical process. The laws of momentum and energy conservation are typical examples. In this section we shall apply these laws to a commonly encountered phenomena, namely collisions. Several games such as billiards, marbles or carrom involve collisions. We shall study the collision of two masses in an idealised form.
Consider two masses $m_{1}$ and $m_{2}$. The particle $m_{l}$ is moving with speed $v_{1 i}$, the subscript ’ $i$ ’ implying initial. We can cosider $m_{2}$ to be at rest. No loss of generality is involved in making such a selection. In this situation the mass $m_{1}$ collides with the stationary mass $m_{2}$ and this is depicted in Fig. 5.10.The masses $m_{1}$ and $m_{2}$ fly-off in different directions. We shall see that there are relationships, which connect the masses, the velocities and the angles.

Fig. 5.10 Collision of mass m1 , with a stationary mass m2 .
5.11.1 Elastic and Inelastic Collisions
In all collisions the total linear momentum is conserved; the initial momentum of the system is equal to the final momentum of the system. One can argue this as follows. When two objects collide, the mutual impulsive forces acting over the collision time $\Delta t$ cause a change in their respective momenta :
$$ \begin{aligned} & \Delta \mathbf{p} _{1}=\mathbf{F} _{12} \Delta t \\ & \Delta \mathbf{p} _{2}=\mathbf{F} _{21} \Delta t \end{aligned} $$
where $F_{12}$ is the force exerted on the first particle by the second particle. $F_{21}$ is likewise the force exerted on the second particle by the first particle. Now from Newton’s third law, $F_{12}=-F_{21}$. This implies
$$ \Delta \mathbf{p} _{1}+\Delta \mathbf{p} _{2}=0 $$
The above conclusion is true even though the forces vary in a complex fashion during the collision time $\Delta t$. Since the third law is true at every instant, the total impulse on the first object is equal and opposite to that on the second.
On the other hand, the total kinetic energy of the system is not necessarily conserved. The impact and deformation during collision may generate heat and sound. Part of the initial kinetic energy is transformed into other forms of energy. A useful way to visualise the deformation during collision is in terms of a ‘compressed spring’. If the ‘spring’ connecting the two masses regains its original shape without loss in energy, then the initial kinetic energy is equal to the final kinetic energy but the kinetic energy during the collision time $\Delta t$ is not constant. Such a collision is called an elastic collision. On the other hand the deformation may not be relieved and the two bodies could move together after the collision. A collision in which the two particles move together after the collision is called a completely inelastic collision. The intermediate case where the deformation is partly relieved and some of the initial kinetic energy is lost is more common and is appropriately called an inelastic collision.
5.11.2 Collisions in One Dimension
Consider first a completely inelastic collision in one dimension. Then, in Fig. 5.10,
$$ \begin{align*} & \theta_{1}=\theta_{2}=0 \\ & m_{1} v_{1 i}=\left(m_{1}+m_{2}\right) v_{f} \text { (momentum conservation) } \\ & v_{f}=\frac{m_{1}}{m_{1}+m_{2}} v_{1 i} \tag{5.22} \end{align*} $$
The loss in kinetic energy on collision is
$$ \begin{aligned} & \Delta K=\frac{1}{2} m_{1} v_{1 i}^{2}-\frac{1}{2}\left(m_{1}+m_{2}\right) v_{f}^{2} \\ & =\frac{1}{2} m_{1} v_{1 i}^{2}-\frac{1}{2} \frac{m_{1}^{2}}{m_{1}+m_{2}} v_{1 i}^{2} \quad \text { [using Eq. (5.22)] } \\ & =\frac{1}{2} m_{1} v_{1 i}^{2} 1-\frac{m_{1}}{m_{1}+m_{2}} \\ & =\frac{1}{2} \frac{m_{1} m_{2}}{m_{1}+m_{2}} v_{1 i}^{2} \end{aligned} $$
which is a positive quantity as expected.
Consider next an elastic collision. Using the above nomenclature with $\theta_{1}=\theta_{2}=0$, the momentum and kinetic energy conservation equations are
$$ \begin{align*} & m_{1} v_{1 i}=m_{1} v_{1 f}+m_{2} v_{2 f} \tag{5.23}\\ & m_{1} v_{1 i}^{2}=m_{1} v_{1 f}^{2}+m_{2} v_{2 f}^{2} \tag{5.24} \end{align*} $$
From Eqs. (5.23) and (5.24) it follows that,
$$ m_{1} v_{1 i}\left(v_{2 f}-v_{1 i}\right)=m_{1} v_{1 f}\left(v_{2 f}-v_{1 f}\right) $$
or,
$$ \begin{align*} v _{2 f}\left(v _{1 i}-v _{1 f}\right) & =v _{1 i}^{2}-v _{1 f}^{2} \\ & =\left(v _{1 i}-v _{1 f}\right)\left(v _{1 i}+v _{1 f}\right) \tag{5.25} \end{align*} $$
Substituting this in Eq. (5.23), we obtain
$$ \begin{align*} v_{1 f} & =\frac{\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}} v_{1 i} \tag{5.26}\\ \text { and } \quad v_{2 f} & =\frac{2 m_{1} v_{1 i}}{m_{1}+m_{2}} \tag{5.27} \end{align*} $$
Thus, the ‘unknowns’ {$V_{1f} \quad V_{2f}$} are obtained in terms of the ‘knowns’ {$ m_1, m_2, v_1 i $}. Special cases of our analysis are interesting.
Case I : If the two masses are equal
$$ \begin{aligned} & V_{1 f}=0 \\ & V_{2 f}=V_{1 i} \end{aligned} $$
The first mass comes to rest and pushes off the second mass with its initial speed on collision.
Case II : If one mass dominates, e.g. $m_{2} > > m_{1}$
$$ V_{1 f} \simeq-V_{1 i} \quad V_{2 f} \simeq 0 $$
The heavier mass is undisturbed while the lighter mass reverses its velocity.
Example 5.11 Slowing down of neutrons: In a nuclear reactor a neutron of high speed (typically $10^{7} \mathrm{~m} \mathrm{~s}^{-1}$ ) must be slowed to $10^3 \mathrm{~m} \mathrm{~s}^{-1}$ so that it can have a high probability of interacting with isotope $ { }_{92}^{235} U $ and causing it to fission. Show that a neutron can lose most of its kinetic energy in an elastic collision with a light nuclei like deuterium or carbon which has a mass of only a few times the neutron mass. The material making up the light nuclei, usually heavy water ($D_2O$) or graphite, is called a moderator.
Answer The initial kinetic energy of the neutron is
$$ K_{1 i}=\frac{1}{2} m_{1} v_{1 i}^{2} $$
while its final kinetic energy from Eq. (5.26)
$$ K_{1 f}=\frac{1}{2} m_{1} v_{1 f}^{2}=\frac{1}{2} m_{1} \left(\frac{m_1-m_2}{m_1+m_2} \right)^{2} v_{1 i}^{2} $$
The fractional kinetic energy lost is
$$ f_{1}=\frac{K_{1 f}}{K_{1 i}}=\left(\frac{m_1-m_2}{m_1+m_2} \right)^{2} $$
while the fractional kinetic energy gained by the moderating nuclei $K_{2 f} / K_{l i}$ is
$$ \begin{aligned} f_{2}=1 & -f_{1} \text { (elastic collision) } \\ = & \frac{4 m_{1} m_{2}}{\left(m_{1}+m_{2}\right)^{2}} \end{aligned} $$
One can also verify this result by substituting from Eq. (5.27).
For deuterium $m_{2}=2 m_{1}$ and we obtain $f_{1}=1 / 9$ while $f_{2}=8 / 9$. Almost $90 %$ of the neutron’s energy is transferred to deuterium. For carbon $f_{1}=71.6 %$ and $f_{2}=28.4 \%$. In practice, however, this number is smaller since head-on collisions are rare.
If the initial velocities and final velocities of both the bodies are along the same straight line, then it is called a one-dimensional collision, or head-on collision. In the case of small spherical bodies, this is possible if the direction of travel of body 1 passes through the centre of body 2 which is at rest. In general, the collision is two- dimensional, where the initial velocities and the final velocities lie in a plane.
5.11.3 Collisions in Two Dimensions
Fig. 5.10 also depicts the collision of a moving mass $m_{1}$ with the stationary mass $m_{2}$. Linear momentum is conserved in such a collision. Since momentum is a vector this implies three equations for the three directions ${x, y, z}$. Consider the plane determined by the final velocity directions of $m_{1}$ and $m_{2}$ and choose it to be the $x-y$ plane. The conservation of the $z$-component of the linear momentum implies that the entire collision is in the $x-y$ plane. The $x$ - and $y$-component equations are
$$ \begin{align*} & m_{1} v_{1 i}=m_{1} v_{1 f} \cos \theta_{1}+m_{2} v_{2 f} \cos \theta_{2} \tag{5.28}\\ & 0=m_{1} v_{1 f} \sin \theta_{1}-m_{2} v_{2 f} \sin \theta_{2} \tag{5.29} \end{align*} $$
One knows $\{m_{1}, m_{2}, v_{1 i}\}$ in most situations. There are thus four unknowns $\{v_{1 f}, v_{2 f}, \theta_{1}\}$ and $\{\theta_{2}\}$, and only two equations. If $\theta_{1}=\theta_{2}=0$, we regain Eq. (5.23) for one dimensional collision.
If, further the collision is elastic,
$$ \begin{equation*} \frac{1}{2} m_{1} v_{1 i}^{2}=\frac{1}{2} m_{1} v_{1 f}^{2}+\frac{1}{2} m_{2} v_{2 f}^{2} \tag{5.30} \end{equation*} $$
We obtain an additional equation. That still leaves us one equation short. At least one of the four unknowns, say $\theta_{1}$, must be made known for the problem to be solvable. For example, $\theta_{1}$ can be determined by moving a detector in an angular fashion from the $x$ to the $y$ axis. Given $\{ m_1, m_2, v_{1i}, \theta_1 \}$ we can determine $\{V_{1 f}, V_{2 f}, \theta_{2}\}$ from Eqs. (5.28)-(5.30).
Example 5.12 Consider the collision depicted in Fig. 5.10 to be between two billiard balls with equal masses $m_{1}=m_{2}$. The first ball is called the cue while the second ball is called the target. The billiard player wants to ‘sink’ the target ball in a corner pocket, which is at an angle $\theta_{2}=37$. Assume that the collision is elastic and that friction and rotational motion are not important. Obtain $\theta_{1}$.
Answer From momentum conservation, since the masses are equal
$$ \mathbf{v} _{1 i}=\mathbf{v} _{1 \mathrm{f}}+\mathbf{v} _{2 \mathrm{f}} $$
$$ \begin{gather*} v _{1 i}^{2}=\left(\mathbf{v} _{1 f}+\mathbf{v} _{2 f}\right) \cdot\left(\mathbf{v} _{1 f}+\mathbf{v} _{2 f}\right) \\ =v _{1 f}^{2}+v _{2 f}^{2}+2 \mathbf{v} _{1 f} \cdot \mathbf{v} _{2 f} \\ =\left\{{v _{1 f}}^{2}+v _{2 f}^{2}+2 v _{1 f} v _{2 f} \cos \left(\theta _{1}+37^{\circ}\right)\right\} \tag{5.31} \end{gather*} $$
Since the collision is elastic and $m_{1}=m_{2}$ it follows from conservation of kinetic energy that
$$ \begin{equation*} v_{1 i}^{2}=v_{1 f}^{2}+v_{2 f}^{2} \tag{5.32} \end{equation*} $$
Comparing Eqs. (5.31) and (5.32), we get
$$ \cos \left(\theta_{1}+37^{\circ}\right)=0 $$
$$ \text{or} \quad \quad \quad \theta_{1}+37^{\circ}=90^{\circ} $$
Thus, $\theta_{1}=53^{\circ}$
This proves the following result : when two equal masses undergo a glancing elastic collision with one of them at rest, after the collision, they will move at right angles to each other. The matter simplifies greatly if we consider spherical masses with smooth surfaces, and assume that collision takes place only when the bodies touch each other. This is what happens in the games of marbles, carrom and billiards.
In our everyday world, collisions take place only when two bodies touch each other. But consider a comet coming from far distances to the sun, or alpha particle coming towards a nucleus and going away in some direction. Here we have to deal with forces involving action at a distance. Such an event is called scattering. The velocities and directions in which the two particles go away depend on their initial velocities as well as the type of interaction between them, their masses, shapes and sizes.
Summary
1. The work-energy theorem states that the change in kinetic energy of a body is the work done by the net force on the body.
$$ K_{f}-K_{i}=W_{\text {net }} $$
2. A force is conservative if (i) work done by it on an object is path independent and depends only on the end points $\{x_{i}, x_{j}\}$, or (ii) the work done by the force is zero for an arbitrary closed path taken by the object such that it returns to its initial position.
3. For a conservative force in one dimension, we may define a potential energy function $V(x)$ such that
$$ F(x)=-\frac{\mathrm{d} V(x)}{\mathrm{d} x} $$
or , $\quad V _{i}-V _{s}=\int _{x _{i}}^{x _{f}} F(x) \mathrm{d} x$
4. The principle of conservation of mechanical energy states that the total mechanical energy of a body remains constant if the only forces that act on the body are conservative.
5. The gravitational potential energy of a particle of mass $m$ at a height $x$ about the earth’s surface is $$ V(x)=m g x $$ where the variation of $g$ with height is ignored.
6. The elastic potential energy of a spring of force constant $k$ and extension $x$ is
$$ V(x)=\frac{1}{2} k x^{2} $$
7. The scalar or dot product of two vectors $\mathbf{A}$ and $\mathbf{B}$ is written as $\mathbf{A} \cdot \mathbf{B}$ and is a scalar quantity given by $: \mathbf{A} \cdot \mathbf{B}=A B \cos \theta$, where $\theta$ is the angle between $\mathbf{A}$ and $\mathbf{B}$. It can be positive, negative or zero depending upon the value of $\theta$. The scalar product of two vectors can be interpreted as the product of magnitude of one vector and component of the other vector along the first vector. For unit vectors :
$$ \hat{\mathbf{i}} \cdot \underline{\hat{\mathbf{i}}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=1 \text { and } \hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \underline{\hat{\mathbf{k}}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{i}}=0 $$
Scalar products obey the commutative and the distributive laws.
| Physical Quantity | Symbol | Dimensions | Units | Remarks |
|---|---|---|---|---|
| Work | $W$ | $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $\mathrm{W}=\mathbf{F} \cdot \mathbf{d}$ |
| Kinetic energy | $\mathrm{K}$ | $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $\mathrm{K}=\frac{1}{2} m v^{2}$ |
| Potential energy | $V(x)$ | $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $F(x)=-\frac{\mathrm{d} V(x)}{\mathrm{d} x}$ |
| Mechanical energy | $E$ | $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $E=K+V$ |
| Spring constant | $k$ | $\left[\mathrm{MT}^{-2}\right]$ | $\mathrm{N} \mathrm{m}^{-1}$ | $F=-k x$ $V(x)=\frac{1}{2} k x^{2}$ |
| Power | P | $\left[\mathrm{ML}^{2} \mathrm{T}^{-3} \right]$ | W | $\mathrm{P}=\mathbf{F} \cdot \mathbf{v}$ $\mathrm{P} W$ |
POINTS TO PONDER
1. The phrase ‘calculate the work done’ is incomplete. We should refer (or imply clearly by context) to the work done by a specific force or a group of forces on a given body over a certain displacement.
2. Work done is a scalar quantity. It can be positive or negative unlike mass and kinetic energy which are positive scalar quantities. The work done by the friction or viscous force on a moving body is negative.
3. For two bodies, the sum of the mutual forces exerted between them is zero from Newton’s Third Law,
$$ \mathbf{F} _{12}+\mathbf{F} _{21}=0 $$
But the sum of the work done by the two forces need not always cancel, i.e. $$ W _{12}+W _{21} \neq 0 $$
However, it may sometimes be true.
4. The work done by a force can be calculated sometimes even if the exact nature of the force is not known. This is clear from Example 5.2 where the WE theorem is used in such a situation.
5. The WE theorem is not independent of Newton’s Second Law. The WE theorem may be viewed as a scalar form of the Second Law. The principle of conservation of mechanical energy may be viewed as a consequence of the WE theorem for conservative forces.
6. The WE theorem holds in all inertial frames. It can also be extended to noninertial frames provided we include the pseudoforces in the calculation of the net force acting on the body under consideration.
7. The potential energy of a body subjected to a conservative force is always undetermined upto a constant. For example, the point where the potential energy is zero is a matter of choice. For the gravitational potential energy mgh, the zero of the potential energy is chosen to be the ground. For the spring potential energy $k x^{2} / 2$, the zero of the potential energy is the equilibrium position of the oscillating mass.
8. Every force encountered in mechanics does not have an associated potential energy. For example, work done by friction over a closed path is not zero and no potential energy can be associated with friction.
9. During a collision : (a) the total linear momentum is conserved at each instant of the collision ; (b) the kinetic energy conservation (even if the collision is elastic) applies after the collision is over and does not hold at every instant of the collision. In fact the two colliding objects are deformed and may be momentarily at rest with respect to each other.
Exercises
5.1 The sign of work done by a force on a body is important to understand. State carefully if the following quantities are positive or negative:
(a) work done by a man in lifting a bucket out of a well by means of a rope tied to the bucket.
(b) work done by gravitational force in the above case,
(c) work done by friction on a body sliding down an inclined plane,
(d) work done by an applied force on a body moving on a rough horizontal plane with uniform velocity,
(e) work done by the resistive force of air on a vibrating pendulum in bringing it to rest.
Show Answer
Answer
(a) Positive
In the given case, force and displacement are in the same direction. Hence, the sign of work done is positive. In this case, the work is done on the bucket.
(b) Negative
In the given case, the direction of force (vertically downward) and displacement (vertically upward) are opposite to each other. Hence, the sign of work done is negative.
(c) Negative
Since the direction of frictional force is opposite to the direction of motion, the work done by frictional force is negative in this case.
(d) Positive
Here the body is moving on a rough horizontal plane. Frictional force opposes the motion of the body. Therefore, in order to maintain a uniform velocity, a uniform force must be applied to the body. Since the applied force acts in the direction of motion of the body, the work done is positive.
(e) Negative
The resistive force of air acts in the direction opposite to the direction of motion of the pendulum. Hence, the work done is negative in this case.
5.2 A body of mass $2 \mathrm{~kg}$ initially at rest moves under the action of an applied horizontal force of $7 \mathrm{~N}$ on a table with coefficient of kinetic friction $=0.1$. Compute the
(a) work done by the applied force in $10 \mathrm{~s}$,
(b) work done by friction in $10 \mathrm{~s}$,
(c) work done by the net force on the body in $10 \mathrm{~s}$,
(d) change in kinetic energy of the body in $10 \mathrm{~s}$, and interpret your results.
Show Answer
Answer
Mass of the body, $m=2 kg$
Applied force, $F=7 N$
Coefficient of kinetic friction, $\mu=0.1$
Initial velocity, $u=0$
Time, $t=10 s$
The acceleration produced in the body by the applied force is given by Newton’s second law of motion as:
$a^{\prime}=\frac{F}{m}=\frac{7}{2}=3.5 m / s^{2}$
Frictional force is given as:
$ \begin{aligned} & f=\mu m g \\ & =0.1 \times 2 \times 9.8=-1.96 N \end{aligned} $
The acceleration produced by the frictional force:
$ a^{\prime \prime}=-\frac{1.96}{2}=-0.98 m / s^{2} $
Total acceleration of the body:
$ \begin{aligned} a & =a^{\prime}+a^{\prime \prime} \\ & =3.5+(-0.98)=2.52 m / s^{2} \end{aligned} $
The distance travelled by the body is given by the equation of motion:
$ \begin{aligned} s & =u t+\frac{1}{2} a t^{2} \\ & =0+\frac{1}{2} \times 2.52 \times(10)^{2}=126 m \end{aligned} $
Work done by the applied force, $W_a=F \times s=7 \times 126=882 J$
Work done by the frictional force, $W_f=F \times s=-1.96 \times 126=-247 J$
Net force $=7+(-1.96)=5.04 N$
Work done by the net force, $W _{\text{net }}=5.04 \times 126=635 J$
From the first equation of motion, final velocity can be calculated as:
$v=u+a t$
$=0+2.52 \times 10=25.2 m / s$
Change in kinetic energy $=\frac{1}{2} m v^{2}-\frac{1}{2} m u^{2}$
$ =\frac{1}{2} \times 2(v^{2}-u^{2})=(25.2)^{2}-0^{2}=635 J $
5.3 Given in Fig. 5.11 are examples of some potential energy functions in one dimension. The total energy of the particle is indicated by a cross on the ordinate axis. In each case, specify the regions, if any, in which the particle cannot be found for the given energy. Also, indicate the minimum total energy the particle must have in each case. Think of simple physical contexts for which these potential energy shapes are relevant.

Fig. 5.11
Show Answer
Answer
$x>a ; 0$
Total energy of a system is given by the relation:
$E=$ P.E. + K. E.
$\therefore$ K.E. $=E-$ P.E.
Kinetic energy of a body is a positive quantity. It cannot be negative. Therefore, the particle will not exist in a region where K.E. becomes negative.
In the given case, the potential energy $(V_0)$ of the particle becomes greater than total energy $(E)$ for $x>a$. Hence, kinetic energy becomes negative in this region. Therefore, the particle will not exist is this region. The minimum total energy of the particle is zero.
All regions
In the given case, the potential energy $(V_0)$ is greater than total energy $(E)$ in all regions. Hence, the particle will not exist in this region.
$x>a$ and $x<b ;-V_1$
In the given case, the condition regarding the positivity of K.E. is satisfied only in the region between
$x>a$ and $x<b$.
The minimum potential energy in this case is $-V_1$. Therfore, K.E. $=E-(-V_1)=E+V_1$. Therefore, for the positivity of the kinetic energy, the totaol energy of the particle must be greater than $-V_1$. So, the minimum total energy the particle must have is $-V_1$.
$ -\frac{b}{2}<x<\frac{a}{2} ; \quad \frac{a}{2}<x<\frac{b}{2} ;-V_1 $
In the given case, the potential energy $(V_0)$ of the particle becomes greater than the total energy (E) for $-\frac{b}{2}<x<\frac{b}{2}$ and $-\frac{a}{2}<x<\frac{a}{2}$. Therefore, the particle will not exist in these regions.
The minimum potential energy in this case is $-V_1$. Therfore, K.E. $=E-(-V_1)=E+V_1$. Therefore, for the positivity of the kinetic energy, the totaol energy of the particle must be greater than $-V_1$. So, the minimum total energy the particle must have is $-V_1$.
5.4 The potential energy function for a particle executing linear simple harmonic motion is given by $V(x)=$ $k x^{2} / 2$, where $k$ is the force constant of the oscillator. For $k=0.5 \mathrm{~N} \mathrm{~m}^{-1}$, the graph of $V(x)$ versus $x$ is shown in Fig. 5.12. Show that a particle of total energy $1 \mathrm{~J}$ moving under this potential must ’turn back’ when it reaches $x= \pm 2 \mathrm{~m}$.

Show Answer
Answer
Total energy of the particle, $E=1 J$
Force constant, $k=0.5 N m^{-1}$
Kinetic energy of the particle, $K=\frac{1}{2} m v^{2}$
According to the conservation law:
$E=V+K$
$1=\frac{1}{2} k x^{2}+\frac{1}{2} m v^{2}$
At the moment of ’turn back’, velocity (and hence $K$ ) becomes zero.
$ \begin{aligned} & \therefore 1=\frac{1}{2} k x^{2} \\ & \frac{1}{2} \times 0.5 x^{2}=1 \\ & x^{2}=4 \\ & x= \pm 2 \end{aligned} $
Hence, the particle turns back when it reaches $x= \pm 2 m$.
5.5 Answer the following :
(a) The casing of a rocket in flight burns up due to friction. At whose expense is the heat energy required for burning obtained? The rocket or the atmosphere?
(b) Comets move around the sun in highly elliptical orbits. The gravitational force on the comet due to the sun is not normal to the comet’s velocity in general. Yet the work done by the gravitational force over every complete orbit of the comet is zero. Why?
(c) An artificial satellite orbiting the earth in very thin atmosphere loses its energy gradually due to dissipation against atmospheric resistance, however small. Why then does its speed increase progressively as it comes closer and closer to the earth?
(d) In Fig. 5.13(i) the man walks $2 \mathrm{~m}$ carrying a mass of $15 \mathrm{~kg}$ on his hands. In Fig. 5.13(ii), he walks the same distance pulling the rope behind him. The rope goes over a pulley, and a mass of $15 \mathrm{~kg}$ hangs at its other end. In which case is the work done greater?

Fig. 5.13
Show Answer
Answer
(a) Rocket
The burning of the casing of a rocket in flight (due to friction) results in the reduction of the mass of the rocket.
According to the conservation of energy:
Total Energy (T.E.) = Potential energy (P.E.) + Kinetic energy (K.E.)
$ =m g h+\frac{1}{2} m v^{2} $
The reduction in the rocket’s mass causes a drop in the total energy. Therefore, the heat energy required for the burning is obtained from the rocket.
(b) Gravitational force is a conservative force. Since the work done by a conservative force over a closed path is zero, the work done by the gravitational force over every complete orbit of a comet is zero.
(c) When an artificial satellite, orbiting around earth, moves closer to earth, its potential energy decreases because of the reduction in the height. Since the total energy of the system remains constant, the reduction in P.E. results in an increase in K.E. Hence, the velocity of the satellite increases. However, due to atmospheric friction, the total energy of the satellite decreases by a small amount.
(d) In the second case
Case (i)
Mass, $m=15 kg$
Displacement, $s=2 m$
Work done, $W=F s \cos \theta$
Where, $\theta=$ Angle between force and displacement
$=m g s \cos \theta=15 \times 2 \times 9.8 \cos 90^{\circ}$
$=0 \quad(\because \cos 90^{\circ}=0)$
Case (ii)
Mass, $m=15 kg$
Displacement, $s=2 m$
Here, the direction of the force applied on the rope and the direction of the displacement of the rope are same.
Therefore, the angle between them, $\theta=0^{\circ}$
Since $\cos 0^{\circ}=1$
Work done, $W=F s \cos \theta=m g s$
$=15 \times 9.8 \times 2=294 J$
Hence, more work is done in the second case.
5.6 Underline the correct alternative :
(a) When a conservative force does positive work on a body, the potential energy of the body increases/decreases/remains unaltered.
(b) Work done by a body against friction always results in a loss of its kinetic/potential energy.
(c) The rate of change of total momentum of a many-particle system is proportional to the external force/sum of the internal forces on the system.
(d) In an inelastic collision of two bodies, the quantities which do not change after the collision are the total kinetic energy/total linear momentum/total energy of the system of two bodies.
Show Answer
Answer
(a) Decreases
(c) Kinetic energy
(d) External force
(e) Total linear momentum
Explanation:
(a) A conservative force does a positive work on a body when it displaces the body in the direction of force. As a result, the body advances toward the centre of force. It decreases the separation between the two, thereby decreasing the potential energy of the body.
(b) The work done against the direction of friction reduces the velocity of a body. Hence, there is a loss of kinetic energy of the body.
(c) Internal forces, irrespective of their direction, cannot produce any change in the total momentum of a body. Hence, the total momentum of a many- particle system is proportional to the external forces acting on the system.
(d) The total linear momentum always remains conserved whether it is an elastic collision or an inelastic collision.
5.7 State if each of the following statements is true or false. Give reasons for your answer.
(a) In an elastic collision of two bodies, the momentum and energy of each body is conserved.
(b) Total energy of a system is always conserved, no matter what internal and external forces on the body are present.
(c) Work done in the motion of a body over a closed loop is zero for every force in nature.
(d) In an inelastic collision, the final kinetic energy is always less than the initial kinetic energy of the system.
Show Answer
Answer
(a) False
(b) False
(c) False
(d) True
Explanation:
(a) In an elastic collision, the total energy and momentum of both the bodies, and not of each individual body, is conserved.
(b) Although internal forces are balanced, they cause no work to be done on a body. It is the external forces that have the ability to do work. Hence, external forces are able to change the energy of a system.
(c) The work done in the motion of a body over a closed loop is zero for a conservation force only.
(d) In an inelastic collision, the final kinetic energy is always less than the initial kinetic energy of the system. This is because in such collisions, there is always a loss of energy in the form of heat, sound, etc.
5.8 Answer carefully, with reasons :
(a) In an elastic collision of two billiard balls, is the total kinetic energy conserved during the short time of collision of the balls (i.e. when they are in contact) ?
(b) Is the total linear momentum conserved during the short time of an elastic collision of two balls?
(c) What are the answers to (a) and (b) for an inelastic collision ?
(d) If the potential energy of two billiard balls depends only on the separation distance between their centres, is the collision elastic or inelastic? (Note, we are talking here of potential energy corresponding to the force during collision, not gravitational potential energy).
Show Answer
Answer
(a) No
In an elastic collision, the total initial kinetic energy of the balls will be equal to the total final kinetic energy of the balls. This kinetic energy is not conserved at the instant the two balls are in contact with each other. In fact, at the time of collision, the kinetic energy of the balls will get converted into potential energy.
(b) Yes
In an elastic collision, the total linear momentum of the system always remains conserved.
(c) No; Yes
In an inelastic collision, there is always a loss of kinetic energy, i.e., the total kinetic energy of the billiard balls before collision will always be greater than that after collision.
The total linear momentum of the system of billiards balls will remain conserved even in the case of an inelastic collision.
(d) Elastic
In the given case, the forces involved are conservation. This is because they depend on the separation between the centres of the billiard balls. Hence, the collision is elastic.
5.9 A body is initially at rest. It undergoes one-dimensional motion with constant acceleration. The power delivered to it at time $t$ is proportional to
(i) $t^{1 / 2}$
(ii) $t$
(iii) $t^{3 / 2}$
(iv) $t^{2}$
Show Answer
Answer
Answer: (ii) $t$
Mass of the body $=m$
Acceleration of the body $=a$
Using Newton’s second law of motion, the force experienced by the body is given by the equation:
$F=m a$
Both $m$ and $a$ are constants. Hence, force $F$ will also be a constant.
$F=m a=$ Constant $\ldots(i)$
For velocity $v$, acceleration is given as,
$a=\frac{d v}{d t}=$ Constant
$d v=$ Constant $\times d t$
$v=\alpha t \quad \quad \quad \ldots(ii)$
Where, $\alpha$ is another constant
$v \propto t \quad \quad \quad \ldots(iii)$
Power is given by the relation:
$P=F . v$
Using equations ( $i$ ) and (iii), we have:
$P \propto t$
Hence, power is directly proportional to time.
5.10 A body is moving unidirectionally under the influence of a source of constant power. Its displacement in time $t$ is proportional to
(i) $t^{1 / 2}$
(ii) $t$
(iii) $t^{3 / 2}$
(iv) $t^{2}$
Show Answer
Answer
(iii) $t^{\frac{3}{2}}$
Power is given by the relation:
$P=F v$
$=m a v=m v \frac{d v}{d t}=$ Constant (say, $k$ )
$\therefore v d v=\frac{k}{m} d t$
Integrating both sides:
$\frac{v^{2}}{2}=\frac{k}{m} t$
$v=\sqrt{\frac{2 k t}{m}}$
For displacement $x$ of the body, we have:
$v=\frac{d x}{d t}=\sqrt{\frac{2 k}{m}} t^{\frac{1}{2}}$
$d x=k^{\prime} t^{\frac{1}{2}} d t$
Where $k^{\prime}=\sqrt{\frac{2 k}{3}}=$ New constant
On integrating both sides, we get: $x=\frac{2}{3} k^{\prime} t^{\frac{3}{2}}$
$\therefore x \propto t^{\frac{3}{2}}$
5.11 A body constrained to move along the z-axis of a coordinate system is subject to a constant force $\mathbf{F}$ given by
$$ \mathbf{F}=-\hat{\mathbf{i}}+2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}} \mathrm{N} $$
where $\hat{\mathbf{i}}, \hat{\mathbf{j}}, \hat{\mathbf{k}}$ are unit vectors along the $x$-, $y$ - and $z$-axis of the system respectively. What is the work done by this force in moving the body a distance of $4 \mathrm{~m}$ along the $z$-axis?
Show Answer
Answer
Force exerted on the body, $\mathbf{F}=-\hat{\mathbf{i}}+2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}} N$
Displacement, $s=4 \hat{\mathbf{k}} _{m}$
Work done, $W=$ F. $s$
$ \begin{aligned} & =(-\hat{\mathbf{i}}+2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}) \cdot(4 \hat{\mathbf{k}}) \\ & =0+0-3 \times 4 \\ & =12 \mathbf{J} \end{aligned} $
Hence, $12 J$ of work is done by the force on the body.
5.12 An electron and a proton are detected in a cosmic ray experiment, the first with kinetic energy $10 \mathrm{keV}$, and the second with $100 \mathrm{keV}$. Which is faster, the electron or the proton ? Obtain the ratio of their speeds. (electron mass $=9.11 \times 10^{-31} \mathrm{~kg}$, proton mass $=1.67 \times 10^{-27} \mathrm{~kg}, 1 \mathrm{eV}=1.60 \times 10^{-19} \mathrm{~J}$.
Show Answer
Answer
Electron is faster; Ratio of speeds is $13.54: 1$
Mass of the electron, $m_e=9.11 \times 10^{-31} kg$
Mass of the proton, $m_p=1.67 \times 10^{-27} kg$
Kinetic energy of the electron, $E _{Ke}=10 keV=10^{4} eV$
$=10^{4} \times 1.60 \times 10^{-19}$
$=1.60 \times 10^{-15} J$
Kinetic energy of the proton, $E _{Kp}=100 keV=10^{5} eV=1.60 \times 10^{-14} J$
For the velocity of an electron $v_e$, its kinetic energy is given by the relation:
$E _{Ke}=\frac{1}{2} m v_c^{2}$
$\therefore v_e=\sqrt{\frac{2 \times E _{Ke}}{m}}$
$=\sqrt{\frac{2 \times 1.60 \times 10^{-15}}{9.11 \times 10^{-31}}}=5.93 \times 10^{7} m / s$
For the velocity of a proton $v_p$, its kinetic energy is given by the relation:
$E _{Kp}=\frac{1}{2} m v_p^{2}$
$v_p=\sqrt{\frac{2 \times E _{Kp}}{m}}$
$\therefore v_p=\sqrt{\frac{2 \times 1.6 \times 10^{-14}}{1.67 \times 10^{-27}}}=4.38 \times 10^{6} m / s$
Hence, the electron is moving faster than the proton.
The ratio of their speeds:
$\frac{v_e}{v_p}=\frac{5.93 \times 10^{7}}{4.38 \times 10^{6}}=13.54: 1$
5.13 A rain drop of radius $2 \mathrm{~mm}$ falls from a height of $500 \mathrm{~m}$ above the ground. It falls with decreasing acceleration (due to viscous resistance of the air) until at half its original height, it attains its maximum (terminal) speed, and moves with uniform speed thereafter. What is the work done by the gravitational force on the drop in the first and second half of its journey? What is the work done by the resistive force in the entire journey if its speed on reaching the ground is $10 \mathrm{~m} \mathrm{~s}^{-1}$ ?
Show Answer
Answer
Radius of the rain drop, $r=2 mm=2 \times 10^{-3} m$
Volume of the rain drop, $\quad V=\frac{4}{3} \pi r^{3}$
$ =\frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} m^{-3} $
Density of water, $\rho=10^{3} kg m^{-3}$
Mass of the rain drop, $m=\rho V$
$=\frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} \times 10^{3} kg$
Gravitational force, $F=m g$
$=\frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} \times 10^{3} \times 9.8 N$
The work done by the gravitational force on the drop in the first half of its journey:
$W_I=F s$
$=\frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} \times 10^{3} \times 9.8 \times 250$
$=0.082 J$
This amount of work is equal to the work done by the gravitational force on the drop in the second half of its journey, i.e., $W_{II}=0.082 J$
As per the law of conservation of energy, if no resistive force is present, then the total energy of the rain drop will remain the same.
$\therefore$ Total energy at the top:
$E_T=m g h+0$
$=\frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} \times 10^{3} \times 9.8 \times 500 \times 10^{-5}$
$=0.164 J$
Due to the presence of a resistive force, the drop hits the ground with a velocity of $10 m / s$.
$\therefore$ Total energy at the ground:
$E_G=\frac{1}{2} m v^{2}+0$
$=\frac{1}{2} \times \frac{4}{3} \times 3.14 \times(2 \times 10^{-3})^{3} \times 10^{3} \times 9.8 \times(10)^{2}$
$=1.675 \times 10^{-3} J$
$\therefore$ Resistive force $=E_G-E_T=-0.162 J$
5.14 A molecule in a gas container hits a horizontal wall with speed $200 \mathrm{~m} \mathrm{~s}^{-1}$ and angle $30^{\circ}$ with the normal, and rebounds with the same speed. Is momentum conserved in the collision? Is the collision elastic or inelastic?
Show Answer
Answer
Yes; Collision is elastic
The momentum of the gas molecule remains conserved whether the collision is elastic or inelastic.
The gas molecule moves with a velocity of $200 m / s$ and strikes the stationary wall of the container, rebounding with the same speed.
It shows that the rebound velocity of the wall remains zero. Hence, the total kinetic energy of the molecule remains conserved during the collision. The given collision is an example of an elastic collision.
5.15 A pump on the ground floor of a building can pump up water to fill a tank of volume $30 \mathrm{~m}^{3}$ in $15 \mathrm{~min}$. If the tank is $40 \mathrm{~m}$ above the ground, and the efficiency of the pump is $30 \%$, how much electric power is consumed by the pump?
Show Answer
Answer
Volume of the tank, $V=30 m^{3}$
Time of operation, $t=15 min=15 \times 60=900 s$
Height of the tank, $h=40 m$
Efficiency of the pump, $\eta=30 \%$
Density of water, $\rho=10^{3} kg / m^{3}$
Mass of water, $m=\rho V=30 \times 10^{3} kg$
Output power can be obtained as:
$ \begin{aligned} P_0 & =\frac{\text{ Work done }}{\text{ Time }}=\frac{m g h}{t} \\ & =\frac{30 \times 10^{3} \times 9.8 \times 40}{900}=13.067 \times 10^{3} W \end{aligned} $
For input power $P_i$, efficiency $\eta$, is given by the relation:
$ \begin{aligned} \eta & =\frac{P_0}{P_i}=30 \% \\ P_i & =\frac{13.067}{30} \times 100 \times 10^{3} \\ & =0.436 \times 10^{5} W \\ & =43.6 kW \end{aligned} $
5.16 Two identical ball bearings in contact with each other and resting on a frictionless table are hit head-on by another ball bearing of the same mass moving initially with a speed $V$. If the collision is elastic, which of the following (Fig. 5.14) is a possible result after collision?

Fig. 5.14
Show Answer
Answer
Case (ii)
It can be observed that the total momentum before and after collision in each case is constant.
For an elastic collision, the total kinetic energy of a system remains conserved before and after collision.
For mass of each ball bearing $m$, we can write:
Total kinetic energy of the system before collision:
$ \begin{aligned} & =\frac{1}{2} m V^{2}+\frac{1}{2}(2 m) 0 \\ & =\frac{1}{2} m V^{2} \end{aligned} $
Case (i)
Total kinetic energy of the system after collision:
$ \begin{aligned} & =\frac{1}{2} m \times 0+\frac{1}{2}(2 m)(\frac{V}{2})^{2} \\ & =\frac{1}{4} m V^{2} \end{aligned} $
Hence, the kinetic energy of the system is not conserved in case (i).
Case (ii)
Total kinetic energy of the system after collision:
$ \begin{aligned} & =\frac{1}{2}(2 m) \times 0+\frac{1}{2} m V^{2} \\ & =\frac{1}{2} m V^{2} \end{aligned} $
Hence, the kinetic energy of the system is conserved in case (ii).
Case (iii)
Total kinetic energy of the system after collision:
$ \begin{aligned} & =\frac{1}{2}(3 m)(\frac{V}{3})^{2} \\ & =\frac{1}{6} m V^{2} \end{aligned} $
Hence, the kinetic energy of the system is not conserved in case (iii).
5.17 The bob A of a pendulum released from $30^{\circ}$ to the vertical hits another bob $B$ of the same mass at rest on a table as shown in Fig. 5.15. How high does the bob A rise after the collision? Neglect the size of the bobs and assume the collision to be elastic.

Fig. 5.15
Show Answer
Answer
Bob A will not rise at all
In an elastic collision between two equal masses in which one is stationary, while the other is moving with some velocity, the stationary mass acquires the same velocity, while the moving mass immediately comes to rest after collision. In this case, a complete transfer of momentum takes place from the moving mass to the stationary mass.
Hence, bob A of mass $m$, after colliding with bob B of equal mass, will come to rest, while bob $B$ will move with the velocity of bob $A$ at the instant of collision.
5.18 The bob of a pendulum is released from a horizontal position. If the length of the pendulum is $1.5 \mathrm{~m}$, what is the speed with which the bob arrives at the lowermost point, given that it dissipated $5 \%$ of its initial energy against air resistance?
Show Answer
Answer
Length of the pendulum, $l=1.5 m$
Mass of the bob $=m$
Energy dissipated $=5 \%$
According to the law of conservation of energy, the total energy of the system remains constant.
At the horizontal position:
Potential energy of the bob, $E_P=m g l$
Kinetic energy of the bob, $E_K=0$
Total energy $=m g l \ldots(i)$
At the lowermost point (mean position):
Potential energy of the bob, $E_P=0$
Kinetic energy of the bob, $E_K=\frac{1}{2} m v^{2}$
Total energy $E_x=\frac{1}{2} m v^{2} \ldots($ ii $)$
As the bob moves from the horizontal position to the lowermost point, $5 \%$ of its energy gets dissipated.
The total energy at the lowermost point is equal to $95 \%$ of the total energy at the horizontal point, i.e.,
$ \begin{aligned} & \frac{1}{2} m v^{2}=\frac{95}{100} \times m g l \\ & \therefore v=\sqrt{\frac{2 \times 95 \times 1.5 \times 9.8}{100}} \\ & \quad=5.28 m/s \end{aligned} $
5.19 A trolley of mass $300 \mathrm{~kg}$ carrying a sandbag of $25 \mathrm{~kg}$ is moving uniformly with a speed of $27 \mathrm{~km} / \mathrm{h}$ on a frictionless track. After a while, sand starts leaking out of a hole on the floor of the trolley at the rate of $0.05 \mathrm{~kg} \mathrm{~s}^{-1}$. What is the speed of the trolley after the entire sand bag is empty?
Show Answer
Answer
The sand bag is placed on a trolley that is moving with a uniform speed of $27 km / h$. The external forces acting on the system of the sandbag and the trolley is zero. When the sand starts leaking from the bag, there will be no change in the velocity of the trolley. This is because the leaking action does not produce any external force on the system. This is in accordance with Newton’s first law of motion. Hence, the speed of the trolley will remain $27 km / h$.
5.20 A body of mass $0.5 \mathrm{~kg}$ travels in a straight line with velocity $v=a x^{3 / 2}$ where $a=5 \mathrm{~m}^{-1 / 2} \mathrm{~s}^{-1}$. What is the work done by the net force during its displacement from $x=0$ to $x=2 \mathrm{~m}$ ?
Show Answer
Answer
Mass of the body, $m=0.5 kg$
Velocity of the body is governed by the equation, $v=a x^{\frac{3}{2}}$ with $a=5 m^{\frac{-1}{2}} s^{-1}$
Initial velocity, $u($ at $x=0)=0$
Final velocity $v($ at $x=2 m)=10 \sqrt{2} m / s$
Work done, $W=$ Change in kinetic energy
$=\frac{1}{2} m(v^{2}-u^{2})$
$=\frac{1}{2} \times 0.5[(10 \sqrt{2})^{2}-(0)^{2}]$
$=\frac{1}{2} \times 0.5 \times 10 \times 10 \times 2$
$=50 J$
5.21 The blades of a windmill sweep out a circle of area A. (a) If the wind flows at a velocity $v$ perpendicular to the circle, what is the mass of the air passing through it in time $t$ ? (b) What is the kinetic energy of the air? (c) Assume that the windmill converts $25 \%$ of the wind’s energy into electrical energy, and that $A=30 \mathrm{~m}^{2}, v=36$ $\mathrm{km} / \mathrm{h}$ and the density of air is $1.2 \mathrm{~kg} \mathrm{~m}^{-3}$. What is the electrical power produced?
Show Answer
Answer
Area of the circle swept by the windmill $=A$
Velocity of the wind $=v$
Density of air $=\rho$
Volume of the wind flowing through the windmill per sec $=A v$
Mass of the wind flowing through the windmill per sec $=\rho A v$
Mass $m$, of the wind flowing through the windmill in time $t=\rho A v t$
Kinetic energy of air $=\frac{1}{2} m v^{2}$
$=\frac{1}{2}(\rho A v t) v^{2}=\frac{1}{2} \rho A v^{3} t$
Area of the circle swept by the windmill $=A=30 m^{2}$
Velocity of the wind $=v=36 km / h$
Density of air, $\rho=1.2 kg m^{-3}$
Electric energy produced $=25 \%$ of the wind energy
$ \begin{aligned} & =\frac{25}{100} \times \text{ Kinetic energy of air } \\ & =\frac{1}{8} \rho A v^{3} t \end{aligned} $
Electrical power $=\frac{\text{ Electrical energy }}{\text{ Time }}$
$ \begin{aligned} & =\frac{1}{8} \frac{\rho A v^{3} t}{t}=\frac{1}{8} \rho A v^{3} \\ & =\frac{1}{8} \times 1.2 \times 30 \times(10)^{3} \\ & =4.5 \times 10^{3} W=4.5 kW \end{aligned} $
5.22 A person trying to lose weight (dieter) lifts a $10 \mathrm{~kg}$ mass, one thousand times, to a height of $0.5 \mathrm{~m}$ each time. Assume that the potential energy lost each time she lowers the mass is dissipated. (a) How much work does she do against the gravitational force ? (b) Fat supplies $3.8 \times 10^{7} \mathrm{~J}$ of energy per kilogram which is converted to mechanical energy with a $20 \%$ efficiency rate. How much fat will the dieter use up?
Show Answer
Answer
Mass of the weight, $m=10 kg$
Height to which the person lifts the weight, $h=0.5 m$
Number of times the weight is lifted, $n=1000$
$\therefore$ Work done against gravitational force:
$ \begin{aligned} & =n(m g h) \\ & =1000 \times 10 \times 9.8 \times 0.5 \\ & =49 \times 10^{3} J=49 kJ \end{aligned} $
Energy equivalent of $1 kg$ of fat $=3.8 \times 10^{7} J$
Efficiency rate $=20 \%$
Mechanical energy supplied by the person’s body:
$ \begin{aligned} & =\frac{20}{100} \times 3.8 \times 10^{7} J \\ & =\frac{1}{5} \times 3.8 \times 10^{7} J \end{aligned} $
Equivalent mass of fat lost by the dieter:
$ \begin{aligned} & =\frac{1}{\frac{1}{5} \times 3.8 \times 10^{7}} \times 49 \times 10^{3} \\ & =\frac{245}{3.8} \times 10^{-4} \\ & =6.45 \times 10^{-3} kg \end{aligned} $
5.23 A family uses $8 \mathrm{~kW}$ of power. (a) Direct solar energy is incident on the horizontal surface at an average rate of $200 \mathrm{~W}$ per square meter. If $20 \%$ of this energy can be converted to useful electrical energy, (a)how large an area is needed to supply $8 \mathrm{~kW}$ ? (b) Compare this area to that of the roof of a typical house.
Show Answer
Answer
(a) $200 m^{2}$
Power used by the family, $P=8 kW=8 \times 10^{3} W$
Solar energy received per square metre $=200 W$
Efficiency of conversion from solar to electricity energy $=20 \%$
Area required to generate the desired electricity $=A$
As per the information given in the question, we have:
$ \begin{aligned} & 8 \times 10^{3}=20 \% \times(A \times 200) \\ & =\frac{20}{100} \times A \times 200 \\ & \therefore A=\frac{8 \times 10^{3}}{40}=200 m^{2} \end{aligned} $
The area of a solar plate required to generate $8 kW$ of electricity is almost equivalent to the area of the roof of a building having dimensions $14 m \times 14 m$.
5.1 भूमिका
दैनिक बोल चाल की भाषा में हम प्राय: ‘कार्य’, ‘ऊर्जा’, और ‘शक्ति’ शब्दों का प्रयोग करते हैं। यदि कोई किसान खेत जोतता है, कोई मिस्त्री ईंट ढोता है, कोई छात्र परीक्षा के लिए पढ़ता है या कोई चित्रकार सुन्दर दृश्यभूमि का चित्र बनाता है तो हम कहते हैं कि सभी कार्य कर रहे हैं परन्तु भौतिकी में कार्य शब्द को परिशुद्ध रूप से परिभाषित करते हैं। जिस व्यक्ति में प्रतिदिन चौदह से सोलह घण्टें कार्य करने की क्षमता होती है, उसे अधिक शक्ति या ऊर्जा वाला कहते हैं। हम लंबी दूरी वाले घातक को उसकी शक्ति या ऊर्जा के लिए प्रशंसा करते हैं। इस प्रकार ऊर्जा कार्य करने की क्षमता है। भौतिकी में भी ऊर्जा कार्य से इसी प्रकार सम्बन्धित है परन्तु जैसा ऊपर बताया गया है शब्द कार्य को और अधिक परिशुद्ध रूप से परिभाषित करते हैं। शक्ति शब्द का दैनिक जीवन में प्रयोग विभिन्न अर्थों में होता है। कराटे या बॉक्सिंग में शक्तिशाली मुक्का वही माना जाता है जो तेज गति से मारा जाता है। शब्द ‘शक्ति’ का यह अर्थ भौतिकी में इस शब्द के अर्थ के निकट है। हम यह देखेंगे कि इन पदों की भौतिक परिभाषाओं तथा इनके द्वारा मस्तिष्क में बने कार्यकीय चित्रणों के बीच अधिक से अधिक यह सम्बन्ध अल्प ही होता है। इस पाठ का लक्ष्य इन तीन भौतिक राशियों की धारणाओं का विकास करना है लेकिन इसके पहले हमें आवश्यक गणितीय भाषा मुख्यतः दो सदिशों के अदिश गुणनफल को समझना होगा।
5.1.1 अदिश गुणनफल
अध्याय 4 में हम लोगों ने सदिश राशियों और उनके प्रयोगों के बारे में पढ़ा है। कई भौतिक राशियाँ; जैसे-विस्थापन, वेग, त्वरण, बल आदि सदिश हैं। हम लोगों ने सदिशों को जोड़ना और घटाना भी सीखा है। अब हम लोग सदिशों के गुणन के बारे में अध्ययन करेंगे। सदिशों को गुणा करने की दो विधियाँ हैं। प्रथम विधि से दो सदिशों के गुणनफल से अदिश गुणनफल प्राप्त होता है और इसे अदिश गुणनफल कहते हैं। दूसरी विधि में दो सदिशों के गुणनफल से एक सदिश प्राप्त होता है और इसे सदिश गुणनफल कहते हैं। सदिश गुणनफल के बारे में हम लोग अध्याय 6 में पढ़ेंगे। इस अध्याय में हम लोग अदिश गुणनफल की विवेचना करेंगे। किन्हीं दो सदिशों $\mathbf{A}$ तथा $\mathbf{B}$ के अदिश या बिंदु-गुणनफल (डॉट गुणनफल) को हम [A.B (A डॉट B)] के रूप में लिखते हैं और निम्न प्रकार से परिभाषित करते हैं :
$$ \begin{equation*} \text { A. } \mathbf{B}=A B \cos \theta \tag{5.1a} \end{equation*} $$
यहाँ $\theta$ दो सदिशों $\mathbf{A}$ तथा $\mathbf{B}$ के बीच का कोण है। इसे चित्र $5.1 \mathrm{a}$ में दिखाया गया है। क्योंकि, $B$ तथा $\cos \theta$ सभी अदिश हैं इसलिए $A$ तथा $B$ का बिंदु गुणनफल भी अदिश राशि है। $\mathbf{A}$ व B में से प्रत्येक की अपनी-अपनी दिशा है किन्तु उनके अदिश गुणनफल की कोई दिशा नहीं है।
समीकरण (5.1a) से हमें निम्नलिखित परिणाम मिलता है :
$$ \begin{aligned} \mathbf{A} \cdot \mathbf{B} & =A(B \cos \theta) \\ & =B(A \cos \theta) \end{aligned} $$
ज्यामिति के अनुसार $B \cos \theta$ सदिश $\mathbf{B}$ का सदिश $\mathbf{A}$ पर प्रक्षेप है (चित्र 5.1b)। इसी प्रकार $A \cos \theta$ सदिश $\mathbf{A}$ का सदिश $\mathbf{B}$ पर प्रक्षेप है (देखिए चित्र 5.1c)। इस प्रकार $\mathbf{A} \cdot \mathbf{B}$ सदिश $\mathbf{A}$ के परिमाण तथा $\mathbf{B}$ के अनुदिश $\mathbf{A}$ के घटक के गुणनफल के बराबर होता है। दूसरे तरीके से यह $\mathbf{B}$ के परिमाण तथा $\mathbf{A}$ का सदिश $\mathbf{B}$ के अनुदिश घटक के गुणनफल के बराबर है।
समीकरण (5.1a) से यह संकेत भी मिलता है कि अदिश गुण्नफल क्रम विनिमेय नियम का पालन करता है-
$\mathbf{A} \cdot \mathbf{B}=\mathbf{B} \cdot \mathbf{A}$
अदिश गुणनफल वितरण-नियम का भी पालन करते हैं :
$$ \mathbf{A} \cdot(\mathbf{B}+\mathbf{C})=\mathbf{A} \cdot \mathbf{B}+\mathbf{A} \cdot \mathbf{C} $$
तथा, $$ \mathbf{A} \cdot(\lambda \mathbf{B})=\lambda(\mathbf{A} \cdot \mathbf{B}) $$
यहाँ $\lambda$ एक वास्तविक संख्या है।
उपरोक्त समीकरणों की व्युत्पत्ति आपके लिए अभ्यास हेतु छोड़ी जा रही है।
अब हम एकांक सदिशों $\hat{\mathbf{i}}, \hat{\mathbf{j}}, \hat{\mathbf{k}}$ का अदिश गुणनफल निकालेंगे। क्योंकि वे एक दूसरे के लंबवत् हैं, इसलिए
$$ \begin{aligned} & \hat{\mathbf{i}} \cdot \hat{\mathbf{i}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=1 \\ & \hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{k}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{i}}=0 \end{aligned} $$
दो सदिशों
$$ \begin{aligned} & \mathbf{A}=A _{x} \hat{\mathbf{i}}+A _{y} \hat{\mathbf{j}}+A _{z} \hat{\mathbf{k}} \\ & \mathbf{B}=B _{x} \hat{\mathbf{i}}+B _{y} \hat{\mathbf{j}}+B _{z} \hat{\mathbf{k}} \end{aligned} $$
का अदिश गुणनफल होगा :
$$ \begin{align*} \mathbf{A} \cdot \mathbf{B} & =\left(A _{x} \hat{\mathbf{i}}+A _{y} \hat{\mathbf{j}}+A _{z} \hat{\mathbf{k}}\right) \cdot\left(B _{x} \hat{\mathbf{i}}+B _{y} \hat{\mathbf{j}}+B _{z} \hat{\mathbf{k}}\right) \\ & =\mathrm{A} _{x} B _{x}+\mathrm{A} _{y} B _{y}+\mathrm{A} _{z} B _{z} \tag{5.1b} \end{align*} $$
अदिश गुणनफल परिभाषा तथा समीकरण (5.1b) से हमें निम्न प्राप्त होता है :
(i) $\quad \mathbf{A} \cdot \mathbf{A}=A _{x} A _{x}+A _{y} A _{y}+A _{z} A _{z}$
अथवा $A^{2}=A^{2}{ } _{x}+A^{2}{ } _{y}+A^{2}{ } _{z}$
क्योंकि $\mathbf{A} \cdot \mathbf{A}=\mathbf{A} \mathbf{A} \cos 0=A^{2}$
(ii) $\mathbf{A} \cdot \mathbf{B}=0$ यदि। $\mathbf{A}$ व $\mathbf{B}$ एक दूसरे के लंबवत् हैं।
उदाहरण 5.1 बल $\mathbf{F}=(3 \hat{i}+4 \hat{\mathbf{j}}-5 \hat{k})$ तथा विस्थापन $\mathbf{d}=(5 \hat{i}+4 \hat{\mathbf{j}}+3 \hat{\mathbf{k}})$ के बीच का कोण ज्ञात करें। $\mathbf{F}$ का d पर प्रक्षेप भी ज्ञात करें।
हल $\mathbf{F} \cdot \mathbf{d}=F _{x} d _{x}+F _{y} d _{y}+F _{z} d _{z}$
$$ =3(5)+4(4)+(-5) $$ $$ =16 \text { unit } $$
अत: $\mathbf{F} \cdot \mathbf{d}=F d \cos \theta=16$ unit
अब $\mathbf{F} \cdot \mathbf{F}=F^{2}=F _{x}^{2}+F _{y}^{2}+F _{z}^{2}$
$$ =9+16+25 $$ $$ =50 \text { unit } $$
तथा $\mathbf{d} \cdot \mathbf{d}=d^{2}=d _{x}^{2}+d _{y}^{2}+d _{z}^{2}$
$$ =25+16+9 $$
$$ =50 \text { unit } $$
$\therefore \cos \theta=\frac{16}{\sqrt{50} \sqrt{50}}=\frac{16}{50}=0.32$
$$ \theta=\cos ^{-1} 0.32 $$
चित्र 5.1 (a) दो सदिशों $\mathbf{A}$ व $\mathbf{B}$ का अदिश गुणनफल एक अदिश होता है अर्थात् $\mathbf{A} \cdot \mathbf{B}=A B \cos \theta,(b) B \cos \theta$ सदिश $\mathbf{B}$ का सदिश $\mathbf{A}$ पर प्रक्षेप है, (c) $A \cos \theta$ सदिश $\mathbf{A}$ का $\mathbf{B}$ पर प्रक्षेप है।
5.2 कार्य और गतिज ऊर्जा की धारणा : कार्य-ऊर्जा प्रमेय
अध्याय 2 में, नियत त्वरण $a$ के अंतर्गत सरल रेखीय गति के लिए आप निम्न भौतिक संबंध पढ़ चुके हैं;
$$ \begin{equation*} v^{2}-u^{2}=2 a s \tag{5.2} \end{equation*} $$
जहाँ $u$ तथा $v$ क्रमशः आरंभिक व अंतिम चाल और $s$ वस्तु द्वारा चली गई दूरी है। दोनों पक्षों को $m / 2$ से गुणा करने पर
$$ \begin{equation*} \frac{1}{2} m v^{2}-\frac{1}{2} m u^{2}=m a s=F s \tag{5.2a} \end{equation*} $$
जहाँ आखिरी चरण न्यूटन के द्वितीय नियमानुसार है। इस प्रकार सदिशों के प्रयोग द्वारा सहज ही समीकरण (5.2) का त्रिविमीय व्यापकीकरण कर सकते हैं
$$ v^{2}-u^{2}=2 \mathbf{a} \cdot \mathbf{d} $$
यहाँ $a$ और $b$ पिंड के क्रमशः त्वरण और विस्थापन सदिश हैं। एक बार फिर दोनों पक्षों को $m / 2$ से गुणा करने पर हम प्राप्त करते हैं
$$ \begin{equation*} \frac{1}{2} m v^{2}-\frac{1}{2} m u^{2}=m \mathbf{a} \cdot \mathbf{d}=\mathbf{F} \cdot \mathbf{d} \tag{5.2b} \end{equation*} $$
उपरोक्त समीकरण कार्य एवं गतिज ऊर्जा को परिभाषित करने के लिए प्रेरित करता है। समीकरण ( 5.2 b) में बायाँ पक्ष वस्तु के द्रव्यमान के आधे और उसकी चाल के वर्ग के गुणनफल के अंतिम और आरंभिक मान का अंतर है। हम इनमें से प्रत्येक राशि को ‘गतिज ऊर्जा’ कहते हैं और संकेत $K$ से निर्दिष्ट करते हैं। समीकरण का दायाँ पक्ष वस्तु पर आरोपित बल का विस्थापन के अनुदिश घटक और वस्तु के विस्थापन का गुणनफल है। इस राशि को ‘कार्य’ कहते हैं और इसे संकेत $W$ से निर्दिष्ट करते हैं। अतः समीकरण $(5.2 \mathrm{~b})$ को निम्न प्रकार लिख सकते हैं :
$$ \begin{equation*} K _{f}-K _{i}=W \tag{5.3} \end{equation*} $$
जहाँ $\mathrm{K} _{\mathrm{i}}$ तथा $\mathrm{K} _{\mathrm{f}}$ वस्तु की आरंभिक एवं अंतिम गतिज ऊर्जा हैं। कार्य किसी वस्तु पर लगने वाले बल और इसके विस्थापन के संबंध को बताता है। अतः किसी निश्चित विस्थापन के दौरान वस्तु पर लगाया गया बल कार्य करता है।
समीकरण (5.3) कार्य-ऊर्जा प्रमेय की एक विशेष स्थिति है जो यह प्रदर्शित करती है कि किसी वस्तु पर लगाए गए कुल बल द्वारा किया गया कार्य उस वस्तु की गतिज ऊर्जा में परिवर्तन के बराबर होता है। परिवर्ती बल के लिए उपरोक्त व्युत्पत्ति का व्यापकीकरण हम अनुभाग 5.6 में करेंगे ।
उदाहरण 5.2 हम अच्छी तरह जानते हैं कि वर्षा की बूँद नीचे की ओर लगने वाले गुरुत्वाकर्षण बल और बूँद के गिरने की दिशा के विपरीत लगने वाले प्रतिरोधी बल के प्रभाव के अधीन गिरती है। प्रतिरोधी बल बूँद की चाल के अनुक्रमानुपाती, परंतु अनिर्धारित होता है। माना कि $1.00 \mathrm{~g}$ द्रव्यमान की वर्षा की बूँद $1.00 \mathrm{~km}$ ऊँचाई से गिर रही है। यह धरातल पर $50.00 \mathrm{~m} \mathrm{~s}^{-1}$ की चाल से संघट्ट करती है। (a) गुरुत्वीय बल द्वारा किया गया कार्य क्या है? (b) अज्ञात प्रतिरोधी बल द्वारा किया गया कार्य क्या है ?
हल (a) बूँद की गतिज ऊर्जा में परिवर्तन
$$ \begin{aligned} & \Delta K=\frac{1}{2} m v^{2}-0 \\ & =\frac{1}{2} \times 10^{-3} \times 50 \times 50 \\ & =1.25 \mathrm{~J} \end{aligned} $$
यहाँ हमने यह मान लिया है कि बूँद विरामावस्था से गिरना आरंभ करती है। गुरुत्वाकर्षण बल द्वारा किया गया कार्य $W _{g}=m g h$ मान लीजिए कि $g=10 \mathrm{~m} \mathrm{~s}^{-2}$ है।
अत: $W _{g}=m g h$
$$ \begin{aligned} & =10^{-3} \times 10 \times 10^{3} \\ & =10 \mathrm{~J} \end{aligned} $$
(b) कार्य-ऊर्जा प्रमेय से, $\Delta K=W _{g}+W _{r}$
जहाँ $W _{r}$ प्रतिरोधी बल द्वारा किया गया कार्य है। अतः
$$ \begin{aligned} W _{r} & =\Delta K-W _{g} \\ & =1.25-10 \\ & =-8.75 \mathrm{~J} \end{aligned} $$
ॠणात्मक है।
5.3 कार्य
उपरोक्त अनुभाग में आपने देखा कि कार्य, बल और उसके द्वारा वस्तु के विस्थापन से संबंधित होता है। माना कि एक अचर बल $\mathbf{F}$, किसी $m$ द्रव्यमान के पिंड पर लग रहा है जिसके कारण पिंड का धनात्मक $x$-दिशा में होने वाला विस्थापन $\mathbf{d}$ है जैसा कि चित्र 5.2 में दर्शाया गया है।

चित्र 5.2 किसी पिंड का आरोपित बल $\mathbf{F}$ के कारण विस्थापन $\mathbf{d}$ ।
अतः किसी बल द्वारा किया गया कार्य “बल के विस्थापन की दिशा के अनुदिश घटक और विस्थापन के परिमाण के गुणनफल” के रूप में परिभाषित किया जाता है। अतः
$$ \begin{equation*} W=(F \cos \theta) d=\mathbf{F} \cdot \mathbf{d} \tag{5.4} \end{equation*} $$
हम देखते हैं कि यदि वस्तु का विस्थापन शून्य है तो बल का परिमाण कितना ही अधिक क्यों न हो, वस्तु द्वारा किया गया कार्य शून्य होता है। जब कभी आप किसी ईंटों की दृढ़ दीवार को धक्का देते हैं तो कोई कार्य नहीं होता है। इस प्रक्रिया में आपकी मांसपेशियों का बारी-बारी से संकुचन और शिथिलीकरण हो रहा है और आंतरिक ऊर्जा लगातार व्यय हो रही है और आप थक जाते हैं। भौतिक विज्ञान में कार्य का अर्थ इसके दैनिक भाषा में प्रयोग के अर्थ से भिन्न है।
कोई भी कार्य संपन्न हुआ नहीं माना जाता है यदि :
(i) वस्तु का विस्थापन शून्य है, जैसा कि पूर्ववर्ती उदाहरण में आपने देखा। कोई भारोत्तोलक $150 \mathrm{~kg}$ द्रव्यमान के भार को $30 \mathrm{~s}$ तक अपने कंधे पर लगातार उठाए हुए खड़ा है तो वह कोई कार्य नहीं कर रहा है।
(ii) बल शून्य है। किसी चिकनी क्षैतिज मेज पर गतिमान पिंड पर कोई क्षैतिज बल कार्य नहीं करता है, (क्योंकि घर्षण नहीं है) परंतु पिंड का विस्थापन काफी अधिक हो सकता है।
(iii) बल और विस्थापन परस्पर लंबवत् हैं क्योंकि $\theta=\pi / 2$ $\operatorname{rad}\left(=90^{\circ}\right), \cos (\pi / 2)=0$ । किसी चिकनी क्षैतिज मेज पर गतिमान पिंड के लिए गुरुत्वाकर्षण बल $m g$ कोई कार्य नहीं करता है क्योंकि यह विस्थापन के लंबवत् कार्य कर रहा है। पृथ्वी के परितः चंद्रमा की कक्षा लगभग वृत्ताकार है। यदि हम चंद्रमा की कक्षा को पूर्ण रूप से वृत्ताकार मान लें, तो पृथ्वी का गुरुत्वाकर्षण बल कोई कार्य नहीं करता है क्योंकि चंद्रमा का तात्कालिक विस्थापन स्पर्शरेखीय है जबकि पृथ्वी का बल त्रिज्यीय (केंद्र की ओर) है, अर्थात् $\theta=\pi / 2$ ।
कार्य धनात्मक व ॠणात्मक दोनों प्रकार का हो सकता है। यदि $\theta, 0^{\circ}$ और $90^{\circ}$ के मध्य है तो समीकरण (5.4) में $\cos \theta$ का मान धनात्मक होगा। यदि $\theta, 90^{\circ}$ और $180^{\circ}$ के मध्य है तो $\cos \theta$ का मान ऋणात्मक होगा। अनेक उदाहरणों में घर्षण बल, विस्थापन का विरोध करता है और $\theta=180^{\circ}$ होता है। ऐसी दशा में घर्षण बल द्वारा किया गया कार्य ऋणात्मक होता है $\left(\cos 180^{\circ}=-1\right)$ ।
समीकरण (5.4) से स्पष्ट है कि कार्य और ऊर्जा की विमाएँ समान $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-2}\right]$ हैं । ब्रिटिश भौतिकविद जेम्स प्रेसकॉट जूल (1818-1869) के सम्मान में इनका SI मात्रक ‘जूल’ कहलाता है। चूंकि कार्य एवं ऊर्जा व्यापक रूप से भौतिक धारणाओं के रूप में प्रयोग किए जाते हैं, अतः ये वैकल्पिक मात्रकों से भरपूर हैं और उनमें से कुछ सारणी 5.1 में सूचीबद्ध हैं।
सारणी 5.1 : कार्य/ऊर्जा के वैकल्पिक मात्रक (जल में)
| अर्ग | $10^{-7} \mathrm{~J}$ |
|---|---|
| इलेक्ट्रॉन वोल्ट $(\mathrm{eV})$ | $1.6 \times 10^{-19} \mathrm{~J}$ |
| कैलोरी (cal) | $4.186 \mathrm{~J}$ |
| किलोवाट-घंटा $(\mathrm{kWh})$ | $3.6 \times 10^{6} \mathrm{~J}$ |
उदाहरण 5.3 कोई साइकिल सवार ब्रेक लगाने पर फिसलता हुआ $10 \mathrm{~m}$ दूर जाकर रुकता है। इस प्रक्रिया की अवधि में, सड़क द्वारा साइकिल पर लगाया गया बल $200 \mathrm{~N}$ है जो उसकी गति के विपरीत है। (a) सड़क द्वारा साइकिल पर कितना कार्य किया गया? (b) साइकिल द्वारा सड़क पर कितना कार्य किया गया?
हल सड़क द्वारा साइकिल पर किया गया कार्य सड़क द्वारा साइकिल पर लगाए गए विरोधी (घर्षण बल) द्वारा किया किया कार्य है।
(a) यहाँ विरोधी बल और साइकिल के विस्थापन के मध्य कोण $180^{\circ}($ या $\pi \mathrm{rad})$ है। अतः सड़क द्वारा किया गया कार्य
$$ \begin{aligned} W _{r} & =F d \cos \theta \\ & =200 \times 10 \times \cos \pi \\ & =-2000 \mathrm{~J} \end{aligned} $$
कार्य-ऊर्जा प्रमेय के अनुसार, इस ऋणात्मक कार्य के कारण ही साइकिल रुक जाती है।
(b) न्यूटन के गति के तृतीय नियमानुसार साइकिल द्वारा सड़क पर लगाया गया बल सड़क द्वारा साइकिल पर लगाए बल के बराबर परंतु विपरीत दिशा में होगा। इसका परिमाण $200 \mathrm{~N}$ है । तथापि, सड़क का विस्थापन नहीं होता है । अतः साइकिल द्वारा सड़क पर किया गया कार्य शून्य होगा।
इस उदाहरण से हमें यह पता चलता है कि यद्यपि पिंड $B$ द्वारा $A$ पर लगाया गया बल, पिंड $A$ द्वारा पिंड $B$ पर लगाए गए बल के बराबर तथा विपरीत दिशा में है (न्यूटन का गति का तीसरा नियम) तथापि यह आवश्यक नहीं है कि पिंड $B$ द्वारा $A$ पर किया गया कार्य, पिंड $A$ द्वारा $B$ पर किए गए कार्य के बराबर तथा विपरीत दिशा में हो।
5.4 गतिज ऊर्जा
जैसा कि पहले उल्लेख किया गया है, यदि किसी पिंड का द्रव्यमान $m$ और वेग $\mathbf{v}$ है तो इसकी गतिज ऊर्जा,गतिज ऊर्जा एक अदिश राशि है।
$$ \begin{equation*} K=\frac{1}{2} m \mathbf{v} \cdot \mathbf{v}=\frac{1}{2} m v^{2} \tag{5.5} \end{equation*} $$
सारणी 5.2 विशिष्ट गतिज ऊर्जाएँ ( $K$ )
| पिंड | द्रव्यमान (kg) | चाल $\left(\mathrm{m} \mathrm{s}^{-1}\right)$ | $K(\mathrm{~J})$ |
|---|---|---|---|
| कार | 2000 | 25 | $6.3 \quad 10^{5}$ |
| धावक (ऐथलीट) | 70 | 10 | $3.510^{3}$ |
| गोली | $5 \quad 10^{-2}$ | 200 | $10^{3}$ |
| $10 \mathrm{~m}$ की ऊँचाई से गिरता पत्थर | 1 | 14 | $10^{2}$ |
| अंतिम वेग से गिरती वर्षा की बूँद | $3.510^{-5}$ | 9 | $1.4 \quad 10^{-3}$ |
| वायु का अणु | $\simeq 10^{-26}$ | 500 | $\simeq 10^{-21}$ |
किसी पिंड की गतिज ऊर्जा, उस पिंड द्वारा किए गए कार्य की माप होती है जो वह अपनी गति के कारण कर सकता है। इस धारणा का अंतर्जान काफी समय से है। तीव्र गति से बहने वाली जल की धारा की गतिज ऊर्जा का उपयोग अनाज पीसने के लिए किया जाता है। पाल जलयान पवन की गतिज ऊर्जा का प्रयोग करते हैं। सारणी 5.2 में विभिन्न पिंडों की गतिज ऊर्जाएँ सूचीबद्ध हैं।
उदाहरण 5.4 किसी प्राक्षेपिक प्रदर्शन में एक पुलिस अधिकारी $50 \mathrm{~g}$ द्रव्यमान की गोली को $2 \mathrm{~cm}$ मोटी नरम परतदार लकड़ी (प्लाइवुड) पर $200 \mathrm{~m} \mathrm{~s}^{-1}$ की चाल से फायर करता है। नरम लकड़ी को भेदने के पश्चात् गोली की गतिज ऊर्जा प्रारंभिक ऊर्जा की $10 \%$ रह जाती है। लकड़ी से निकलते समय गोली की चाल क्या होगी?
हल गोली की प्रारंभिक गतिज ऊर्जा $$ m v^{2} / 2=1000 \mathrm{~J} $$ गोली की अंतिम गतिज ऊर्जा $=0.1 \quad 1000=100 \mathrm{~J}$ । यदि गोली की नरम लकड़ी को भेदने के पश्चात् चाल $V _{f}$ है तो,
$$ \begin{aligned} \frac{1}{2} m v _{f}^{2} & =100 \mathrm{~J} \\ v _{f} & =\sqrt{\frac{2 \times 100 \mathrm{~J}}{0.05 \mathrm{~kg}}} \\ & =63.2 \mathrm{~m} \mathrm{~s}^{-1} \end{aligned} $$
नरम लकड़ी को भेदने के पश्चात् गोली की चाल लगभग $68 \%$ कम हो गई है ( $90 \%$ नहीं)।
5.5 परिवर्ती बल द्वारा किया गया कार्य
अचर बल दुष्प्राप्य है। अधिकतर परिवर्ती बल के उदाहरण ही देखने को मिलते हैं। चित्र 5.3 एकविमीय परिवर्ती बल का आलेख है।
यदि विस्थापन $\Delta x$ सूक्ष्म है तब हम बल $F(x)$ को भी लगभग नियत ले सकते हैं और तब किया गया कार्य
$$ \Delta W=F(x) \Delta x $$
इसे चित्र 5.3(a) में समझाया गया है। चित्र 5.3(a) में क्रमिक आयताकार क्षेत्रफलों का योग करने पर हमें कुल किया गया कार्य प्राप्त होता है जिसे इस प्रकार लिखा जाता है :
$$ \begin{equation*} W \cong \sum _{x _{i}}^{x _{f}} F(x) \Delta x \tag{5.6} \end{equation*} $$
जहाँ संकेत ’ $\Sigma$ ’ का अर्थ है संकलन-फल (योगफल), जबकि ’ $x _{i}^{\prime}$ ’ वस्तु की आरंभिक स्थिति और ’ $x _{f}^{\prime}$ वस्तु की अंतिम स्थिति को निरूपित करता है।
यदि विस्थापनों को अतिसूक्ष्म मान लिया जाए तब योगफल में पदों की संख्या असीमित रूप से बढ़ जाती है लेकिन योगफल एक निश्चित मान के समीप पहुंच जाता है जो चित्र 5.3(b) में वक्र के नीचे के क्षेत्रफल के समान होता है । अतः किया गया कार्य
$$W =\lim\limits_{\Delta x \rightarrow 0} \sum_{x_{i}}^{x_{f}} F(x) \Delta x$$
$$=\int\limits_{x_i}^{x_f} F(x) \mathrm{d} x \tag{5.7}$$
जहाँ ’lim’ का अर्थ है ‘योगफल की सीमा’ जबकि $\Delta x$ नगण्य रूप से सूक्ष्म मानों की ओर अग्रसर है। इस प्रकार परिवर्ती बल के लिए किए गए कार्य को बल का विस्थापन पर सीमांकित समाकलन, के रूप में व्यक्त कर सकते हैं ।

चित्र 5.3 (a)

चित्र 5.3(a) परिवर्ती बल $F(x)$ द्वारा सूक्ष्म विस्थापन $\Delta x$ में किया या कार्य $\Delta W=F(x) \Delta x$ छायांकित आयत से निरूपित है। (b) $\Delta x rightarrow 0$ के लिए सभी आयतों के क्षेत्रफलों को जोड़ने पर, वक्र द्वारा च्छादित क्षेत्रफल, बल $F(x)$ द्वारा किए गए कार्य के ठीक बराबर है ।
उदाहरण 5.5 कोई स्त्री खुरदरी सतह वाले रेलवे प्लेटफार्म पर संदूक को खिसकाती है। वह $10 \mathrm{~m}$ की दूरी तक $100 \mathrm{~N}$ का बल आरोपित करती है। उसके पश्चात्, उत्तरोत्तर वह थक जाती है और उसके द्वारा आरोपित बल रेखीय रूप से घटकर $50 \mathrm{~N}$ हो जाता है। संदूक को कुल $20 \mathrm{~m}$ की दूरी तक खिसकाया जाता है। स्त्री द्वारा संदूक पर आरोपित बल और घर्षण बल जो कि $50 \mathrm{~N}$ है, तथा विस्थापन के बीच ग्राफ खींचिए। दोनों बलों द्वारा $20 \mathrm{~m}$ तक किए गए कार्य का परिकलन कीजिए।
हल चित्र 5.4 में आरोपित बल का आलेख प्रदर्शित किया गया है ।

चित्र 5.4 किसी स्त्री द्वारा आरोपित बल $F$ और विरोधी घर्षण बल $f$ तथा विस्थापन के बीच ग्राफ।
$x=20 \mathrm{~m}$ पर $F=50 \mathrm{~N}(\neq 0)$ है। हमें घर्षण बल $f$ दिया गया है जिसका परिमाण है $|f|=50 \mathrm{~N}$ यह गति का विरोध करता है और आरोपित बल $\mathbf{F}$ के विपरीत दिशा में कार्य करता है। इसलिए, इसे बल-अक्ष की ऋणात्मक दिशा की ओर प्रदर्शित किया गया है।
स्त्री द्वारा किया गया कार्य
$W _{F} \rightarrow$ (आयत $\mathrm{ABCD}+$ समलंब CEID) का क्षेत्रफल
$$ \begin{aligned} W _{F} & =100 \times 10+\frac{1}{2}(100+50) \times 10 \\ & =1000+750 \\ & =1750 \mathrm{~J} \end{aligned} $$
घर्षण बल द्वारा किया गया कार्य
$\mathrm{W} _{F} \rightarrow$ आयत $\mathrm{AGHI}$ का क्षेत्रफल
$$ \begin{aligned} W _{\mathrm{f}} & =(-50) \times 20 \\ & =-1000 \mathrm{~J} \end{aligned} $$
यहाँ क्षेत्रफल का बल-अक्ष के ॠणात्मक दिशा की ओर होने से, क्षेत्रफल का चिहन ऋणात्मक है।
5.6 परिवर्ती बल के लिए कार्य-ऊर्जा प्रमेय
हम परिवर्ती बल के लिए कार्य-ऊर्जा प्रमेय को सिद्ध करने के लिए कार्य और गतिज ऊर्जा की धारणाओं से भलीभांति परिचित हैं। यहाँ हम कार्य-ऊर्जा प्रमेय के एकविमीय पक्ष तक ही विचार को सीमित करेंगे। गतिज ऊर्जा परिवर्तन की दर है :
$$ \begin{aligned} \frac{\mathrm{d} K}{\mathrm{~d} t} & =\frac{\mathrm{d}}{\mathrm{d} t} \frac{1}{2} m v^{2} \\ & =m \frac{\mathrm{d} v}{\mathrm{~d} t} v \\ & =F v\left(\text { न्यूटन के दूसरे नियमानुसार }=\mathrm{m} \frac{\mathrm{d} v}{\mathrm{~d} t}=F\right) \\ & =F \frac{\mathrm{d} x}{\mathrm{~d} t} \end{aligned} $$
अत:
$\mathrm{d} K=F \mathrm{~d} x$
प्रारंभिक स्थिति $x _{i}$ से अंतिम स्थिति $x _{f}$ तक समाकलन करने पर,
$$ \int _{K _{t}}^{K _{f}} d K=\int _{x _{i}}^{x _{f}} F d x $$
जहाँ $x _{i}$ और $x _{f}$ के संगत $K _{i}$ और $K _{f}$ क्रमशः प्रारंभिक एवं अंतिम गतिज ऊर्जाएँ हैं।
$$ \begin{equation*} \text { या } K _{f}-K _{i}=\int _{x _{i}}^{x _{f}} F \mathrm{~d} x \tag{5.8a} \end{equation*} $$
समीकरण (5.7) से प्राप्त होता है
$$ \begin{equation*} K _{f}-K _{i}=W \tag{5.8b} \end{equation*} $$
इस प्रकार परिवर्ती बल के लिए कार्य-ऊर्जा प्रमेय सिद्ध होती है।
हालांकि कार्य-ऊर्जा प्रमेय अनेक प्रकार के प्रश्नों को हल करने में उपयोगी है परंतु यह न्यूटन के द्वितीय नियम की पूर्णरूपेण गतिकीय सूचना का समावेश नहीं करती है। वास्तव में यह न्यूटन के द्वितीय नियम का समाकल रूप है। न्यूटन का द्वितीय नियम किसी क्षण, त्वरण तथा बल के बीच संबंध दर्शाता है। कार्य-ऊर्जा प्रमेय में एक काल के लिए समाकल निहित है। इस दृष्टि से न्यूटन के द्वितीय नियम में निहित कालिक सूचना कार्य ऊर्जा प्रमेय में स्पष्ट रूप से प्रकट नहीं होता। बल्कि एक निश्चित काल के लिए समाकलन के रूप में होता है। दूसरी ध्यान देने की बात यह है कि दो या तीन विमाओं में न्यूटन का द्वितीय नियम सदिश रूप में होता है जबकि कार्य-ऊर्जा प्रमेय अदिश रूप में होता है।न्यूटन के द्वितीय नियम में दिशा संबंधित निहित ज्ञान भी कार्य ऊर्जा प्रमेय जैसे- अदिश संबंध में निहित नहीं है।
उदाहरण 5.6 $\mathrm{~m}(=1 \mathrm{~kg})$ द्रव्यमान का एक गुटका क्षैतिज सतह पर $v _{i}=2 \mathrm{~m} \mathrm{~s}^{-1}$ की चाल से चलते हुए $x=0.10 \mathrm{~m}$ से $x=2.01 \mathrm{~m}$ के खुरदरे हिस्से में प्रवेश करता है। गुटके पर लगने वाला मंदक बल $\left(F _{r}\right)$ इस क्षेत्र में $x$ के व्युत्क्रमानुपाती है,
$F_{r}=\frac{-k}{x}$ for $0.1<x<2.01 \mathrm{~m}$
$=0$ for $x<0.1 \mathrm{~m}$ and $x>2.01 \mathrm{~m}$
जहाँ $k=0.5 \mathrm{~J}$ । गुटका जैसे ही खुरदरे हिस्से को पार करता है, इसकी अंतिम गतिज ऊर्जा और चाल $v _{f}$ की गणना कीजिए।
हल समीकरण $(5.8 \mathrm{a})$ से
$$ \begin{aligned} K _{f} & =K _{i}+\int _{0.1}^{2.01} \frac{(-k)}{x} \mathrm{~d} x \\ & =\frac{1}{2} m v _{i}^{2}-\left.k \ln (x)\right| _{0.1} ^{2.01} \\ & =\frac{1}{2} m v _{i}^{2}-k \ln (2.01 / 0.1) \\ = & 2-0.5 \ln (20.1) \\ = & -1.5=0.5 \mathrm{~J} \\ \end{aligned}$$
$$ \begin{aligned} v _{f} & =\sqrt{2 K _{f} / m}=1 \mathrm{~m} \mathrm{~s}^{-1} \end{aligned} $$
ध्यान दीजिए कि $\ln$ आधार $e$ पर किसी संख्या का प्राकृतिक लघुगणक है, न कि आधार 10 पर किसी संख्या का $\left[\ln \mathrm{X}=\log _{\mathrm{e}} \mathrm{X}=2.303 \log _{10} \mathrm{X}\right]$
5.7 स्थितिज ऊर्जा की अभिधारणा
यहाँ ‘स्थितिज ’ शब्द किसी कार्य को करने की संभावना या क्षमता को व्यक्त करता है। स्थितिज ऊर्जा की धारणा ‘संग्रहित’ ऊर्जा से संबंधित है। किसी खिंचे हुए तीर-कमान के तार (डोरी) की ऊर्जा स्थितिज ऊर्जा होती है। जब इसे ढीला छोड़ा जाता है तो तीर तीव्र चाल से दूर चला जाता है। पृथ्वी के भूपृष्ठ पर भ्रंश रेखाएँ संपीडित कमानियों के सदृश होती हैं। उनकी स्थितिज ऊर्जा बहुत अधिक होती है। जब ये भ्रंश रेखाएँ फिर से समायोजित हो जाती हैं तो भूकंप आता है। किसी भी पिंड की स्थितिज ऊर्जा (संचित ऊर्जा) उसकी स्थिति या अभिविन्यास के कारण होती है। पिंड को मुक्त रूप से छोड़ने पर इसमें संचित ऊर्जा, गतिज ऊर्जा के रूप में निर्मुक्त होती है। आइए, अब हम स्थितिज ऊर्जा की धारणा को एक निश्चित रूप देते हैं।
पृथ्वी की सतह के समीप $m$ द्रव्यमान की एक गेंद पर आरोपित गुरुत्वाकर्षण बल $m g$ है। $g$ को पृथ्वी की सतह के समीप अचर माना जा सकता है । यहाँ समीपता से तात्पर्य यह है कि गेंद की पृथ्वी की सतह से ऊँचाई $h$, पृथ्वी की त्रिज्या $R _{\mathrm{E}}$ की तुलना में अति सूक्ष्म है $\left(h«R _{\mathrm{E}}\right)$, अतः हम पृथ्वी के पृष्ठ पर $g$ के मान में परिवर्तन की उपेक्षा कर सकते हैं।* माना कि गेंद को बिना कोई गति प्रदान किए $h$ ऊँचाई तक ऊपर उठाया जाता है। अतः बाह्य कारक द्वारा गुरुत्वाकर्षण बल के विरुद्ध किया गया कार्य $m g h$ होगा। यह कार्य, स्थितिज ऊर्जा के रूप में संचित हो जाता है। किसी पिण्ड की $h$ ऊँचाई पर गुरुत्वीय स्थितिज ऊर्जा उसी पिण्ड को उसी ऊँचाई तक उठाने में गुरुत्वाकर्षण बल द्वारा किए गए कार्य के ऋणात्मक मान के बराबर होता है।
$$ V(h)=m g h $$
यदि $h$ को परिवर्ती लिया जाता है तो यह सरलता से देखा जा सकता है कि गुरुत्वाकर्षण बल $F, h$ के सापेक्ष $V(h)$ के ॠणात्मक अवकलज के समान है
$$ F=-\frac{\mathrm{d}}{\mathrm{d} h} V(h)=-m g $$
यहाँ ऋणात्मक चिहन प्रदर्शित करता है कि गुरुत्वाकर्षण बल नीचे की ओर है। जब गेंद को छोड़ा जाता है तो यह बढ़ती हुई चाल से नीचे आती है। पृथ्वी की सतह से संघट्ट से पूर्व इसकी चाल शुद्धगतिकी संबंध द्वारा निम्न प्रकार दी जाती है
$$ v^{2}=2 g h $$
इसी समीकरण को निम्न प्रकार से भी लिखा जा सकता है :
$\frac{1}{2} m v^{2}=m g h$
जो यह प्रदर्शित करता है कि जब पिण्ड को मुक्त रूप से छोड़ा जाता है तो पिंड की $h$ ऊँचाई पर गुरुत्वीय स्थितिज ऊर्जा पृथ्वी पर पहुंचने तक स्वतः ही गतिज ऊर्जा में परिवर्तित हो जाती है ।
प्राकृतिक नियमानुसार, स्थितिज ऊर्जा की धारणा केवल उन्हीं बलों की श्रेणी में लागू होती है जहाँ बल के विरुद्ध किया गया कार्य, ऊर्जा के रूप में संचित हो जाता है और जो बाह्य कारक के हट जाने पर स्वतः गतिज ऊर्जा के रूप में दिखाई पड़ती है। गणितानुसार स्थितिज ऊर्जा $V(x)$ को (सरलता के लिए एक-विमा में)[^4] परिभाषित किया जाता है यदि $F(x)$ बल को निम्न रूप में लिखा जाता है :
$$ F(x)=-\frac{\mathrm{d} V}{\mathrm{~d} x} $$
यह निरूपित करता है कि
$$ \int _{x _{i}}^{x _{f}} F(x) \mathrm{d} x=-\int _{V _{i}}^{V _{f}} d V=V _{i}-V _{f} $$
किसी संरक्षी बल जैसे गुरुत्वाकर्षण बल द्वारा किया गया कार्य पिण्ड की केवल आरंभिक तथा अंतिम स्थिति पर निर्भर करता है। पिछले अध्याय में हमने आनत समतल से संबंधित उदाहरणों का अध्ययन किया। यदि $m$ द्रव्यमान का कोई पिण्ड $h$ ऊंचाई के चिकने (घर्षणरहित) आनत तल के शीर्ष से विरामावस्था से छोड़ा जाता है तो आनत समतल के अधस्तल (तली) पर इसकी चाल, आनति (झुकाव) कोण का ध्यान रखे बिना $\sqrt{2 g h}$ होती है। इस प्रकार यहां पर पिण्ड $m g h$ गतिज ऊर्जा प्राप्त कर लेता है। यदि किया गया कार्य या गतिज ऊर्जा दूसरे कारकों, जैसे पिण्ड के वेग या उसके द्वारा चले गए विशेष पथ की लंबाई पर निर्भर करता है तब यह बल असंरक्षी होता है।
कार्य या गतिज ऊर्जा के सदृश स्थितिज ऊर्जा की विमा $\left[\mathrm{ML}^{2} \mathrm{~T}^{-2}\right]$ और SI मात्रक जूल $(\mathrm{J})$ है। याद रखिए कि संरक्षी बल के लिए, स्थितिज ऊर्जा में परिवर्तन $\Delta V$ बल द्वारा किए गए ॠणात्मक कार्य के बराबर होता है।
$$ \begin{equation*} \Delta V=-F(x) \Delta x \tag{5.9} \end{equation*} $$
इस अनुभाग में गिरती हुई गेंद के उदाहरण में हमने देखा कि किस प्रकार गेंद की स्थितिज ऊर्जा उसकी गतिज ऊर्जा में परिवर्तित हो गई थी। यह यांत्रिकी में संरक्षण के महत्त्वपूर्ण सिद्धांत की ओर संकेत करता है जिसे हम अब परखेंगे।
5.8 यांत्रिक ऊर्जा का संरक्षण
सरलता के लिए, हम इस महत्त्वपूर्ण सिद्धांत का एकविमीय गति के लिए निदर्शन कर रहे हैं। मान लीजिए कि किसी पिण्ड का संरक्षी बल $F$ के कारण विस्थापन $\Delta x$ होता है। कार्य-ऊर्जा प्रमेय से, किसी बल $F$ के लिए
$$ \Delta K=F(x) \Delta x $$
संरक्षी बल के लिए स्थितिज ऊर्जा फलन $V(x)$ को निम्न रूप से परिभाषित किया जा सकता है :
$$ -\Delta V=F(x) \Delta x $$
उपरोक्त समीकरण निरूपित करती है कि
$$ \begin{align*} & \Delta K+\Delta V=0 \\ & \Delta(K+V)=0 \tag{5.10} \end{align*} $$
इसका अर्थ है कि किसी पिण्ड की गतिज और स्थितिज ऊर्जाओं का योगफल, $K+V$ अचर होता है। इससे तात्पर्य है कि संपूर्ण पथ $x _{i}$ से $x _{f}$ के लिए
$$ \begin{equation*} K _{i}+V\left(x _{i}\right)=K _{f}+V\left(x _{f}\right) \tag{5.11} \end{equation*} $$
यहाँ राशि $K+V(x)$, निकाय की कुल यांत्रिक ऊर्जा कहलाती है। पृथक रूप से, गतिज ऊर्जा $K$ और स्थितिज ऊर्जा $V(x)$ एक स्थिति से दूसरी स्थिति तक परिवर्तित हो सकती है परंतु इनका योगफल अचर रहता है। उपरोक्त विवेचन से शब्द ‘संरक्षी बल’ की उपयुक्तता स्पष्ट होती है।
आइए, अब हम संक्षेप में संरक्षी बल की विभिन्न परिभाषाओं पर विचार करते हैं।
- कोई बल $F(x)$ संरक्षी है यदि इसे समीकरण (5.9) के प्रयोग द्वारा अदिश राशि $V(x)$ से प्राप्त कर सकते हैं। त्रिविमीय व्यापकीकरण के लिए सदिश अवकलज विधि का प्रयोग करना पड़ता है जो इस पुस्तक के विवेचना क्षेत्र से बाहर है।
- संरक्षी बल द्वारा किया गया कार्य केवल सिरे के बिंदुओं पर निर्भर करता है जो निम्न संबंध से स्पष्ट है :
$W=K _{f}-K _{i}=V\left(x _{i}\right)-V\left(x _{f}\right)$
- तीसरी परिभाषा के अनुसार, इस बल द्वारा बंद पथ में किया गया कार्य शून्य होता है।
यह एक बार फिर समीकरण (5.11) से स्पष्ट है, क्योंकि $x _{i}=x _{f}$ है।
अतः यांत्रिक ऊर्जा-संरक्षण नियम के अनुसार किसी भी निकाय की कुल यान्त्रिक ऊर्जा अचर रहती है यदि उस पर कार्य करने वाले बल संरक्षी हैं।
उपरोक्त विवेचना को अधिक मूर्त बनाने के लिए, एक बार फिर गुरुत्वाकर्षण बल के उदाहरण पर विचार करते हैं और स्प्रिंग बल के उदाहरण पर अगले अनुभाग में विचार करेंगे। चित्र $5.5 \mathrm{H}$ ऊँचाई की किसी चट्टान से गिराई, $m$ द्रव्यमान की गेंद का चित्रण करता है।

चित्र $5.5 \mathrm{H}$ ऊँचाई की किसी चट्टान से गिराई गई, $m$ द्रव्यमान की गेंद की स्थितिज ऊर्जा का गतिज ऊर्जा में रूपांतरण।
गेंद की निदर्शित ऊँचाई, शून्य ( भूमितल), $h$ और $H$ के संगत कुल यांत्रिक ऊर्जाएँ क्रमशः $E _{o}, E _{h}$ और $E _{H}$ हैं
$$ \begin{align*} E_H & =m g H \tag{5.11a}\\ E_h & =m g h + \frac{1}{2} mv_h^2 \\ \end{align*} $$
$$ \begin{align*} E_o & =(1 / 2) mv_f^2 \tag{5.11c}\\ \end{align*} $$
अचर बल, त्रिविम-निर्भर बल $F(x)$ का एक विशेष उदाहरण है । अतः यांत्रिक ऊर्जा संरक्षित है। इस प्रकार
$$ E _{\mathrm{H}}=E _{0} $$ अथवा, $m g H=\frac{1}{2} m v _{f}^{2}$
$$ v _{f}=\sqrt{2 g H} $$
उपरोक्त परिणाम अनुभाग 5.7 में मुक्त रूप से गिरते हुए पिण्ड के वेग के लिए प्राप्त किया गया था। इसके अतिरिक्त
$$ E _{\mathrm{H}}=E _{\mathrm{h}} $$
जो इंगित करता है कि
$$ \begin{equation*} v _{\mathrm{h}}^{2}=2 g(H-h) \tag{5.11d} \end{equation*} $$
उपरोक्त परिणाम, शुद्धगतिकी का एक सुविदित परिणाम है।
$H$ ऊँचाई पर, पिण्ड की ऊर्जा केवल स्थितिज ऊर्जा है। यह $h$ ऊँचाई पर आंशिक रूप से गतिज ऊर्जा में रूपांतरित हो जाती है तथा भूमि तल पर पूर्णरूपेण गतिज ऊर्जा में रूपांतरित हो जाती है। इस प्रकार उपरोक्त उदाहरण, यांत्रिक ऊर्जा के संरक्षण के सिद्धांत को स्पष्ट करता है।
उदाहरण 5.7 $\mathrm{~m}$ द्रव्यमान का एक गोलक $L$ लंबाई की हलकी डोरी से लटका हुआ है। इसके निम्नतम बिंदु $\mathrm{A}$ पर क्षैतिज वेग $v _{0}$ इस प्रकार लगाया जाता है कि यह ऊर्ध्वाधर तल में अर्धवृत्ताकार प्रक्षेप्य पथ को इस प्रकार तय करता है कि डोरी केवल उच्चतम बिंदु $\mathrm{C}$ पर ढीली होती है जैसा कि चित्र 5.6 में दिखाया गया है। निम्न राशियों के लिए व्यंजक प्राप्त कीजिए : (a) $v _{0},(b)$ बिंदुओं $\mathrm{B}$ तथा $\mathrm{C}$ पर गोलक की चाल, तथा $(c)$ बिंदु $\mathrm{B}$ तथा $\mathrm{C}$ पर गतिज ऊर्जाओं का अनुपात $\left(K _{B} / K _{C}\right)$ । गोलक के बिंदु $C$ पर पहुंचने के बाद पथ की प्रकृति पर टिप्पणी कीजिए।
चित्र 5.6
हल (a) यहाँ गोलक पर लगने वाले दो बाह्य बल हैं-गुरुत्व बल और डोरी में तनाव ( $T$ )। बाद वाला बल (तनाव) कोई कार्य नहीं करता है क्योंकि गोलक का विस्थापन हमेशा डोरी के लंबवत् है। अतः गोलक की स्थितिज ऊर्जा केवल गुरुत्वाकर्षण बल से संबंधित है। निकाय की संपूर्ण यांत्रिक ऊर्जा $E$ अचर है । हम निकाय की स्थितिज ऊर्जा निम्नतम बिंदु $A$ पर शून्य ले लेते हैं। अतः बिंदु $\mathrm{A}$ पर
$$ \begin{equation*} E=\frac{1}{2} m v _{O}^{2} \tag{5.12} \end{equation*} $$
$T _{A}-m g=\frac{m v _{0}^{2}}{L}$ [न्यूटन के गति के द्वितीय नियमानुसार]
यहाँ $T _{\mathrm{A}}$, बिंदु $\mathrm{A}$ पर डोरी का तनाव है। उच्चतम बिंदु $\mathrm{C}$ पर डोरी ढीली हो जाती है; अतः यहाँ बिंदु $\mathrm{C}$ पर डोरी का तनाव $T _{\mathrm{C}}=0$ । अतः बिंदु $\mathrm{C}$ पर हमें प्राप्त होता है
$$ \begin{align*} E & =\frac{1}{2} m v _{c}^{2}+2 m g L \tag{5.13} \end{align*} $$
$$ \begin{aligned} & m g=\frac{m v_{c}^{2}}{L} \quad \text { [न्यूटन के द्वितीय नियमानुसार]} {5.14} \end{aligned} $$
जहाँ $v _{\mathrm{c}}$ बिंदु $\mathrm{C}$ पर गोलक की चाल है। समीकरण (5.13) व (5.14) से प्राप्त होता है
$$ E=\frac{5}{2} m g L $$
इसे बिंदु $\mathrm{A}$ पर ऊर्जा से समीकृत करने पर
$$ \frac{5}{2} m g L=\frac{m}{2} v _{O}^{2} $$
अथवा $v _{0}=\sqrt{5 g L}$
(b) समीकरण (5.14) से यह स्पष्ट है कि
$$ v _{C}=\sqrt{g L} $$
अतः बिंदु $\mathrm{B}$ पर ऊर्जा है
$$ E=\frac{1}{2} m v _{B}^{2}+m g L $$
इसे बिंदु $\mathrm{A}$ पर ऊर्जा के व्यंजक के बराबर रखने पर और (a) के परिणाम $v^{2}{ } _{0}=5 g L$ प्रयोग में लाने पर हमें प्राप्त होता है।
$$ \begin{aligned} \frac{1}{2} m v _{B}^{2}+m g L & =\frac{1}{2} m v _{O}^{2} \\ & =\frac{5}{2} m g L \end{aligned} $$
$$ \begin{aligned} \therefore v _{B} & =\sqrt{3 g L} \end{aligned} $$
(c) बिंदु $\mathrm{B}$ व $\mathrm{C}$ पर गतिज ऊर्जाओं का अनुपात
$$ \frac{K _{B}}{K _{C}}=\frac{\frac{1}{2} m v _{B}^{2}}{\frac{1}{2} m v _{C}^{2}}=\frac{3}{1} $$
बिंदु $\mathrm{C}$ पर डोरी ढीली हो जाती है और गोलक का वेग बाईं ओर को एवं क्षैतिज हो जाता है। यदि इस क्षण पर डोरी को काट दिया जाए तो गोलक एक क्षैतिज प्रक्षेप की भांति प्रक्षेप्य गति ठीक उसी प्रकार दर्शाएगा जैसा कि खड़ी चट्टान से क्षैतिज दिशा में किसी पत्थर को फेंकने पर होता है। अन्यथा गोलक लगातार अपने वृत्ताकार पथ पर गति करता रहेगा और परिक्रमण को पूर्ण करेगा।
5.9 किसी स्प्रिंग की स्थितिज ऊर्जा
कोई स्प्रिंग-बल एक परिवर्ती-बल का उदाहरण है जो संरक्षी होता है । चित्र 5.7 स्प्रिंग से संलग्न किसी गुटके को दर्शाता है जो किसी चिकने क्षैतिज पृष्ठ पर विरामावस्था में है। स्प्रिंग का दूसरा सिरा किसी दृढ़ दीवार से जुड़ा है। स्प्रिंग हलका है और द्रव्यमान-रहित माना जा सकता है। किसी आदर्श स्प्रिंग में, स्प्रिंग-बल $F _{\mathrm{s}}$, गुटके का अपनी साम्यावस्था स्थिति से विस्थापन $x$ के समानुपाती होता है। गुटके का साम्यावस्था से विस्थापन धनात्मक (चित्र 5.7b) या ऋणात्मक (चित्र 5.7c) हो सकता है। स्प्रिंग के लिए बल का नियम, हुक का नियम कहलाता है और गणितीय रूप में इस प्रकार व्यक्त किया जा सकता है :
$$ F _{s}=-k x $$
जहाँ नियतांक $k$ एक स्प्रिंग नियतांक है जिसका मात्रक $\mathrm{N} \mathrm{m}^{-1}$ है। यदि $k$ का मान बहुत अधिक है, तब स्प्रिंग को दृढ़ कहा जाता है। यदि $k$ का मान कम है, तब इसे नर्म (मृदु) कहा जाता है।
मान लीजिए कि हम गुटके को बाहर की तरफ, जैसा कि चित्र 5.7(b) में दिखाया गया है, धीमी अचर चाल से खींचते हैं । यदि स्प्रिंग का खिंचाव $x _{m}$ है तो स्प्रिंग-बल द्वारा किया कार्य
$$ \begin{align*} W & =\int _{0}^{x _{m}} F _{s} \mathrm{~d} x=-\int _{0}^{x _{m}} k x \mathrm{~d} x \\ & =-\frac{k x _{m}^{2}}{2} \tag{5.15} \end{align*} $$
इस व्यंजक को हम चित्र 5.7(d) में दिखाए गए त्रिभुज के क्षेत्रफल से भी प्राप्त कर सकते हैं। ध्यान दीजिए कि बाह्य खिंचाव बल द्वारा किया गया कार्य धनात्मक है।
$$ \begin{equation*} W=+\frac{k x _{m}^{2}}{2} \tag{5.16} \end{equation*} $$

चित्र 5.7 किसी स्प्रिंग के मुक्त सिरे से जुड़े हुए गुटके पर स्प्रिंग-बल का निदर्शन (a) जब माध्य स्थिति से विस्थापन $x$ शून्य है तो स्प्रिंग बल $F _{s}$ भी शून्य है । (b) खिंचे हुए स्प्रिंग के लिए $x>0$ और $F _{s}<0$ (c) संपीडित स्प्रिंग के लिए $x<0$ और $F _{s}>0$ (d) $F _{\mathrm{s}}$ तथा $x$ के बीच खींचा गया आलेख । छायांकित त्रिभुज का क्षेत्रफल स्प्रिंग-बल द्वारा किए गए कार्य को निरूपित करता है। $F _{s}$ और $x$ के विपरीत चिह्नों के कारण, किया गया कार्य ॠणात्मक है,
यदि स्प्रिंग का विस्थापन $x _{c}(<0)$ से संपीडित किया जाता है तब भी उपरोक्त व्यंजक सत्य है। स्प्रिंग-बल $W _{s}=-k x _{c}^{2} / 2$ कार्य करता है जबकि बाह्य बल $W=-k x _{c}^{2} / 2$ कार्य करता है। यदि गुटके को इसके आरंभिक विस्थापन $x _{i}$ से अंतिम विस्थापन $x _{f}$ तक विस्थापित किया जाता है तो स्प्रिंग-बल द्वारा किया गया कार्य
$$ \begin{equation*} W _{s}=-\int _{x _{i}}^{x _{f}} k x \mathrm{~d} x=\frac{k x _{i}^{2}}{2}-\frac{k x _{f}^{2}}{2} \tag{5.17} \end{equation*} $$
अतः स्प्रिंग-बल द्वारा किया गया कार्य केवल सिरे के बिंदुओं पर निर्भर करता है। विशेष रूप से जब गुटके को स्थिति $x _{i}$ से खीचा गया हो और वापस $x _{i}$ स्थिति तक आने दिया गया हो तो
$$ \begin{equation*} W _{s}=-\int _{x _{i}}^{x _{f}} k x \mathrm{~d} x=\frac{k x _{i}^{2}}{2}-\frac{k x _{f}^{2}}{2}=0 \tag{5.18} \end{equation*} $$
अतः स्प्रिंग बल द्वारा किसी चक्रीय प्रक्रम में किया गया कार्य शून्य होता है। हमने यहां स्पष्ट कर दिया है कि (i) स्प्रिंग बल केवल स्थिति पर निर्भर करता है जैसा कि हुक द्वारा पहले कहा गया है $\left(F _{s}=-k x\right)$; (ii) यह बल कार्य करता है जो किसी पिण्ड की आरंभिक एवं अंतिम स्थितियों पर निर्भर करता है; उदाहरणार्थ, समीकरण (5.17)। अतः स्प्रिंग बल एक संरक्षी बल है।
जब गुटका साम्यावस्था में है अर्थात् माध्य स्थिति से उसका विस्थापन शून्य है तब स्प्रिंग की स्थितिज ऊर्जा $V(x)$ को हम शून्य मानते हैं। किसी खिंचाव (या संपीडन) $x$ के लिए उपरोक्त विश्लेषण सुझाता है कि
$$ \begin{equation*} V(x)=\frac{1}{2} k x^{2} \tag{5.19} \end{equation*} $$
इसे सुविधापूर्वक सत्यापित किया जा सकता है कि $-\mathrm{d} V / \mathrm{d} x=-k x$ जो कि स्प्रिंग बल है। जब $m$ द्रव्यमान के गुटके को चित्र 5.7 के अनुसार $x _{\mathrm{m}}$ तक खींचा जाता है और फिर विरामावस्था से छोड़ा जाता है, तब इसकी समूची यांत्रिक ऊर्जा स्वेच्छा से चुनी गई किसी भी स्थिति $x$ पर निम्नलिखित रूप में दी जाएगी, जहाँ $x$ का मान $-x _{\mathrm{m}}$ से $+x _{\mathrm{m}}$ के बीच है:
$$ \frac{1}{2} k x _{m}^{2}=\frac{1}{2} k x^{2}+\frac{1}{2} m v^{2} $$
जहाँ हमने यांत्रिक ऊर्जा के संरक्षण नियम का उपयोग किया है । इसके अनुसार गुटके की चाल $v _{m}$ और गतिज ऊर्जा साम्यावस्था $x=0$ पर अधिकतम होगी, अर्थात्
$$ \frac{1}{2} m v _{m}^{2}=\frac{1}{2} k x _{m}^{2} $$
या,
$\quad v _{m}=\sqrt{\frac{k}{m}} x _{m}$
ध्यान दीजिए कि $k / m$ की विमा $\left[\mathrm{T}^{-2}\right]$ है और यह समीकरण विमीय रूप से सही है। यहाँ निकाय की गतिज ऊर्जा, स्थितिज ऊर्जा में, और स्थितिज ऊर्जा, गतिज ऊर्जा में परिवर्तित हो जाती है, तथापि कुल यांत्रिक ऊर्जा नियत रहती है । चित्र 5.8 में इसका ग्राफीय निरूपण किया गया है।

चित्र 5.8 किसी स्प्रिंग से जुड़े हुए गुटके की स्थितिज ऊर्जा $V$ और गतिज ऊर्जा $K$ के परवलयिक आलेख जो हुक के नियम का पालन करते हैं। ये एक-दूसरे के पूरक हैं अर्थात् इनमें जब एक घटता है तो दूसरा बढ़ता है, परंतु कुल यांत्रिक ऊर्जा $E=K+V$ हमेशा अचर रहती है।
उदाहरण 5.8 कार दुर्घटना को दिखाने के लिए (अनुकार) मोटरकार निर्माता विभिन्न स्प्रिंग नियतांकों के स्प्रिंगों का फ्रेम चढ़ाकर चलती हुई कारों के संघट्ट का अध्ययन करते हैं। मान लीजिए किसी प्रतीकात्मक अनुरूपण में कोई $1000 \mathrm{~kg}$ द्रव्यमान की कार एक चिकनी सड़क पर $18 \mathrm{~km} / \mathrm{h}$ की चाल से चलते हुए, क्षैतिज फ्रेम पर चढ़ाए गए स्प्रिंग से संघट्ट करती है जिसका स्प्रिंग नियतांक $5.25 \times 10^{3} \mathrm{~N} \mathrm{~m}^{-1}$ है। स्प्रिंग का अधिकतम संपीडन क्या होगा?
हल कार की गतिज ऊर्जा अधिकतम संपीडन पर संपूर्ण रूप से स्प्रिंग की स्थितिज ऊर्जा में परिवर्तित हो जाती है। गतिमान कार की गतिज ऊर्जा :
$$ \begin{aligned} K & =\frac{1}{2} m v^{2} \\ & =-\frac{1}{2} \times 10^{3} \times 5 \times 5 \\ K & =1.25 \times 10^{4} \mathrm{~J} \end{aligned} $$
जहाँ कार की चाल $18 \mathrm{~km} \mathrm{~h}^{-1}$ को इसके SI मान $5 \mathrm{~m} \mathrm{~s}^{-1}$ में परिवर्तित कर दिया गया है । [ यहाँ यह ध्यान रखने योग्य है कि $36 \mathrm{~km} \mathrm{~h}^{-1}=10 \mathrm{~m} \mathrm{~s}^{-1}$ ] । यांत्रिक ऊर्जा-संरक्षण नियम के अनुसार अधिकतम संपीडन $x _{m}$ पर स्प्रिंग की स्थितिज ऊर्जा (V), गतिशील कार की गतिज ऊर्जा $(K)$ के बराबर होती है। अतः
$$ \begin{aligned} V & =\frac{1}{2} k x _{m}^{2} \\ & =1.25 \times 10^{4} \mathrm{~J} \end{aligned} $$
हल करने पर हम प्राप्त करते हैं कि $x _{m}=2.00 \mathrm{~m}$ ध्यान दें कि यहाँ इस स्थिति को हमने आदर्श रूप में प्रस्तुत किया है। यहाँ स्प्रिंग को द्रव्यमानरहित माना है और सड़क का घर्षण नगण्य लिया है।
हम संरक्षी बलों पर कुछ टिप्पणी करते हुए इस अनुभाग का समापन करते हैं :
(i) उपरोक्त विवेचना में समय के विषय में कोई सूचना नहीं है। इस उदाहरण में हम संपीडन का परिकलन कर सकते हैं लेकिन उस समय अंतराल का परिकलन नहीं कर सकते जिसमें यह संपीडन हुआ है। अतः कालिक सूचना प्राप्त करने के लिए, इस निकाय के लिए न्यूटन के द्वितीय नियम के हल की आवश्यकता है।
(ii) सभी बल संरक्षी नहीं हैं। उदाहरणार्थ, घर्षण एक असंरक्षी बल है। इस स्थिति में, ऊर्जा-सरंक्षण नियम में किंचित परिवर्तन करना पड़ेगा। इसे उदाहरण 5.9 में स्पष्ट किया गया है।
(iii) स्थितिज ऊर्जा का शून्य स्वेच्छा से लिया गया है जिसे सुविधानुसार निश्चित कर लिया जाता है। स्प्रिंग-बल के लिए, $x=0$ पर हम $V=0$ लेते हैं, अर्थात् बिना खिंचे स्प्रिंग की स्थितिज ऊर्जा शून्य थी। नियत गुरुत्वाकर्षण बल $m g$ के लिए हमने पृथ्वी की सतह पर $V=0$ लिया था। अगले अध्याय में हम देखेंगे कि गुरुत्वाकर्षण के सार्वत्रिक नियमानुसार बल के लिए, गुरुत्वाकर्षण स्रोत से अनन्त दूरी पर शून्य सर्वोत्तम रूप से परिभाषित होती है तथापि, किसी विवेचना में स्थितिज ऊर्जा के लिए एक बार शून्य की स्थिति निश्चित करने के पश्चात्, शुरू से अंत तक विवेचना में उसी नियम का पालन करना चाहिए।
उदाहरण 5.9 उदाहरण 5.8 में घर्षण गुणांक $\mu$ का मान 0.5 लेकर कमानी के अधिकतम संपीडन का परिकलन कीजिए।
हल : स्प्रिंग बल और घर्षण बल, दोनों ही संपीडन का विरोध करने में संयुक्त रूप से कार्य करते हैं, जैसा कि चित्र 5.9 में दिखाया गया है।

चित्र 5.9 किसी कार पर आरोपित बल।
यहाँ हम यांत्रिक ऊर्जा-संरक्षण के सिद्धांत के बजाय कार्य-ऊर्जा प्रमेय का प्रयोग करते हैं।
गतिज ऊर्जा में परिवर्तन है :
$$ \Delta K=K _{f}-K _{i}=0-\frac{1}{2} m v^{2} $$
कुल बल द्वारा किया गया कार्य :
$$ W=-\frac{1}{2} k x _{m}^{2}-\mu m g x _{m} $$
$\Delta K$ और $W$ को समीकृत करने पर हम प्राप्त करते हैं
$$ \frac{1}{2} m v^{2}=\frac{1}{2} k x _{m}^{2}+\mu m g x _{m} $$
यहाँ $\mu \mathrm{mg}=0.5 \times 10^{3} \times 10=5 \times 10^{3} \mathrm{~N}\left(g=10 \mathrm{~m} \mathrm{~s}^{-2}\right.$ लेने पर) । उपरोक्त समीकरण को व्यवस्थित करने पर हमें अज्ञात $x _{m}$ के लिए निम्न द्विघातीय समीकरण प्राप्त होती है :
$$ \begin{aligned} & k x _{m}^{2}+2 \mu m g x _{m}-m v^{2}=0 \\ & x _{m}=\frac{-\mu m g+\left[\mu^{2} m^{2} g^{2}+m k v^{2}\right]^{1 / 2}}{k} \end{aligned} $$
जहाँ हमने $x _{m}$ धनात्मक होने के कारण इसका धनात्मक वर्गमूल ले लिया है। आंकिक मानों को समीकरण में प्रतिस्थापित करने पर हम प्राप्त करते हैं
$$ x _{m}=1.35 \mathrm{~m} $$
जो आशानुसार उदाहरण 5.8 में प्राप्त परिणाम से कम है।
यदि मान लें कि पिंड पर लगने वाले दोनों बलों में एक संरक्षी बल $F _{c}$ और दूसरा असंरक्षी बल $F _{n c}$ है तो यांत्रिक ऊर्जा-संरक्षण के सूत्र में किंचित् परिवर्तन करना पड़ेगा। कार्य-ऊर्जा प्रमेय से :
$$ \begin{aligned} &\left(F_{c}+F_{n c}\right) \Delta x=\Delta K \\ \text{परंतु } \quad \quad &F_{c} \Delta x=-\Delta V \\ \text{अत: } \quad \quad&\Delta(K+V)=F_{n c} \Delta \\ &\Delta E=F_{n c} \Delta x \end{aligned} $$
जहाँ $E$ कुल यांत्रिक ऊर्जा है। समस्त पथ पर यह निम्न रूप ले लेती है
$$ E _{f}-E _{i}=W _{n c} $$
जहाँ $W _{n c}$ असंरक्षी बल द्वारा किसी पथ पर किया गया कुल कार्य है। ध्यान दीजिए कि $W _{n c} i$ से $f$ तक एक विशेष पथ पर निर्भर करता है जैसा कि संरक्षी बल में नहीं है।
5.10 शक्ति
बहुधा केवल यह जानना ही पर्याप्त नहीं है कि किसी पिंड पर कितना कार्य किया गया अपितु यह जानना भी आवश्यक है कि यह कार्य किस दर से किया गया है। हम कहते हैं कि व्यक्ति शारीरिक रूप से स्वस्थ है यदि वह केवल किसी भवन के चार तल तक चढ़ ही नहीं जाता है अपितु वह इन पर तेजी से चढ़ जाता है। अतः शक्ति को उस समय-दर से परिभाषित करते हैं जिससे कार्य किया गया या ऊर्जा स्थानांतरित हुई। किसी बल की औसत शक्ति उस बल द्वारा किए गए कार्य $W$ और उसमें लगे समय $t$ के अनुपात से परिभाषित करते हैं। अतः
$$ P _{a v}=\frac{W}{t} $$
तात्क्षणिक शक्ति को औसत शक्ति के सीमान्त मान के रूप में परिभाषित करते हैं जबकि समय शून्य की ओर अग्रसर हो रहा होता है, अर्थात्
$$ \begin{equation*} P=\frac{\mathrm{d} W}{\mathrm{~d} t} \tag{5.20} \end{equation*} $$
जहाँ विस्थापन $\mathrm{d} \mathbf{r}$ में बल $\mathbf{F}$ द्वारा किया गया कार्य $\mathrm{d} W=\mathbf{F} \cdot \mathrm{d} \mathbf{r}$ होता है। अतः तात्क्षणिक शक्ति को निम्नलिखित प्रकार से भी व्यक्त कर सकते हैं :
$$ \begin{align*} P & =\mathbf{F} \cdot \frac{\mathrm{d} \boldsymbol{r}}{\mathrm{d} t} \\ & =\mathbf{F} \cdot \mathbf{v} \tag{5.21} \end{align*} $$
जहाँ $\mathbf{v}$ तात्क्षणिक वेग है जबकि बल $\mathbf{F}$ है।
कार्य और ऊर्जा की भांति शक्ति भी एक अदिश राशि है। इसका SI मात्रक वाट $(\mathrm{W})$ और विमा $\left[\mathrm{ML}^{2} \mathrm{~T}^{-3}\right]$ है। $1 \mathrm{~W}$ का मान $1 \mathrm{~J} \mathrm{~s}^{-1}$ के बराबर होता है। अठारहवीं शताब्दी में भाप इंजन के प्रवर्तकों में से एक प्रवर्तक जेम्स वॉट के नाम पर शक्ति का मात्रक वाट (W) रखा गया है।
शक्ति का बहुत पुराना मात्रक अश्व शक्ति है।
$$ 1 \text { अश्व शक्ति }(\mathrm{hp})=746 \mathrm{~W} $$
यह मात्रक आज भी कार, मोटरबाईक इत्यादि की निर्गत क्षमता को व्यक्त करने के लिए प्रयुक्त होता है।
जब हम विद्युत उपकरण; जैसे-विद्युत बल्ब, हीटर और प्रशीतक आदि खरीदते हैं तो हमें मात्रक वाट से व्यवहार करना होता है । एक 100 वाट का बल्ब 10 घंटे में एक किलोवाट-घंटा विद्युत ऊर्जा की खपत करता है। अर्थात्
$$ \begin{aligned} & 100(\text { वाट }) \times 10(\text { घंटा }) \\ & =1000 \text { वाट-घंटा } \\ & =1 \text { किलोवाट घंटा }(\mathrm{kWh}) \\ & =10^{3}(\mathrm{~W}) \times 3600(\mathrm{~s}) \\ & =3.6 \times 10^{6} \mathrm{~J} \end{aligned} $$
विद्युत-ऊर्जा की खपत के लिए मूल्य, मात्रक $\mathrm{kWh}$ में चुकाया जाता है जिसे साधारणतया ‘यूनिट’ के नाम से पुकारते हैं। ध्यान दें कि $\mathrm{kWh}$ ऊर्जा का मात्रक है, न कि शक्ति का।
उदाहरण 5.10 कोई लिफ्ट जिसका कुल द्रव्यमान ( लिफ्ट + यात्रियों का) $1800 \mathrm{~kg}$ है, ऊपर की ओर $2 \mathrm{~m} \mathrm{~s}^{-1}$ की अचर चाल से गतिमान है। $4000 \mathrm{~N}$ का घर्षण बल इसकी गति का विरोध करता है। लिफ्ट को मोटर द्वारा प्रदत्त न्यूनतम शक्ति का आकलन वाट और अश्व शक्ति में कीजिए।
हल लिफ्ट पर लगने वाला अधोमुखी बल
$$ F=m g+F _{f}=(1800 \times 10)+4000=22000 \mathrm{~N} $$
इस बल को संतुलित करने के लिए मोटर द्वारा पर्याप्त शक्ति की आपूर्ति की जानी चाहिए।
अत: $P=\mathbf{F} \cdot \mathbf{v}=22000 \times 2=44000 \mathrm{~W}=59 \mathrm{hp}$
5.11 संघट्ट
भौतिकी में हम गति (स्थान में परिवर्तन) का अध्ययन करते हैं। साथ ही साथ हम ऐसी भौतिक राशियों की खोज करते हैं जो किसी भौतिक प्रक्रम में परिवर्तित नहीं होती हैं। ऊर्जा-संरक्षण एवं संवेग-संरक्षण के नियम इसके अच्छे उदाहरण हैं। इस अनुभाग में, हम इन नियमों का बहुधा सामने आने वाली परिघटनाओं, जिन्हें संघट्ट कहते हैं, में प्रयोग करेंगे। विभिन्न खेलों; जैसे-बिलियर्ड, मारबल या कैरम आदि में संघट्ट एक अनिवार्य घटक है। अब हम किन्हीं दो द्रव्यमानों का आदर्श रूप में प्रस्तुत संघट्ट का अध्ययन करेंगे।
मान लीजिए कि दो द्रव्यमान $m _{1}$ व $m _{2}$ हैं जिसमें कण $m _{1}$ चाल $v _{l i}$ से गतिमान है जहाँ अधोलिखित ’ $i$ ’ आरंभिक चाल को निरूपित करता है। दूसरा द्रव्यमान $m _{2}$ स्थिर है। इस निर्देश फ्रेम का चयन करने में व्यापकता में कोई कमी नहीं आती। इस फ्रेम में द्रव्यमान $m _{1}$, दूसरे द्रव्यमान $m _{2}$ से जो विरामावस्था में है, संघट्ट करता है जो चित्र 5.10 में चित्रित किया गया है । संघट्ट के पश्चात् द्रव्यमान $m _{1}$ व $m _{2}$ विभिन्न दिशाओं में गति करते हैं। हम देखेंगे कि द्रव्यमानों, उनके वेगों और कोणों में निश्चित संबंध है।

चित्र 5.10 किसी द्रव्यमान $m _{1}$ का अन्य स्थिर द्रव्यमान $m _{2}$ से संघट्ट।
5.11.1 प्रत्यास्थ एवं अप्रत्यास्थ संघट्ट
सभी संघट्टों में निकाय का कुल रेखीय संवेग नियत रहता है अर्थात् निकाय का आरंभिक संवेग उसके अंतिम संवेग के बराबर होता है। इसे निम्न प्रकार से सिद्ध किया जा सकता है । जब दो पिंड संघट्ट करते हैं तो संघट्ट समय $\Delta t$ में कार्यरत परस्पर आवेगी बल, उनके परस्पर संवेगों में परिवर्तन लाने का कारण होते हैं। अर्थात्
$$ \begin{aligned} & \Delta \mathbf{p} _{1}=\mathbf{F} _{12} \Delta t \\ & \Delta \mathbf{p} _{2}=\mathbf{F} _{21} \Delta t \end{aligned} $$
जहाँ $\mathrm{F} _{12}$ दूसरे पिंड द्वारा पहले पिंड पर आरोपित बल है। इसी तरह $\mathbf{F} _{21}$ पहले पिंड द्वारा दूसरे पिंड पर आरोपित बल है। न्यूटन के गति के तृतीय नियमानुसार $\mathbf{F} _{12}=-\mathbf{F} _{21}$ होता है । यह दर्शाता है कि
$$ \Delta \mathbf{p} _{1}+\Delta \mathbf{p} _{2}=0 $$
यदि बल संघट्ट समय $\Delta t$ के दौरान जटिल रूप से परिवर्तित हो रहे हों तो भी उपरोक्त परिणाम सत्य हैं। चूंकि न्यूटन का तृतीय नियम प्रत्येक क्षण पर सत्य है अतः पहले पिंड पर आरोपित कुल आवेग, दूसरे पिंड पर आरोपित आवेग के बराबर परंतु विपरीत दिशा में होगा।
दूसरी ओर निकाय की कुल गतिज ऊर्जा आवश्यक रूप से संरक्षित नहीं रहती है। संघट्ट के दौरान टक्कर और विकृति, ऊष्मा और ध्वनि उत्पन्न करते हैं। आरंभिक गतिज ऊर्जा का कुछ अंश ऊर्जा के दूसरे रूपों में रूपान्तरित हो जाता है। यदि उपरोक्त दोनों द्रव्यमानों को जोड़ने वाली ‘स्प्रिंग’ बिना किसी ऊर्जा-क्षति के अपनी मूल आकृति प्राप्त कर लेती है, जो पिंडों की आरंभिक गतिज ऊर्जा उनकी अंतिम गतिज ऊर्जा के बराबर होगी परंतु संघट्ट काल $\Delta t$ के दौरान अचर नहीं रहती। इस प्रकार के संघट्ट को प्रत्यास्थ संघट्ट कहते हैं। दूसरी ओर यदि विकृति दूर नहीं होती है और दोनों पिंड संघट्ट के पश्चात् आपस में सटे रहकर गति करें तो इस प्रकार के संघट्ट को पूर्णतः अप्रत्यास्थ संघट्ट कहते हैं। इसके अतिरिक्त मध्यवर्ती स्थिति आमतौर पर देखने को मिलती है जब विकृति आंशिक रूप से कम हो जाती है और प्रारंभिक गतिज ऊर्जा की आंशिक रूप से क्षति हो जाती है। इसे समुचित रूप से अप्रत्यास्थ संघट्ट कहते हैं।
5.11.2 एकविमीय संघट्ट
सर्वप्रथम हम किसी पूर्णतः अप्रत्यास्थ संघट्ट की स्थिति का अध्ययन करते हैं। चित्र 5.10 में
$$ \begin{align*} & \theta_{1}=\theta_{2}=0 \\ & m_{1} v_{1 i}=\left(m_{1}+m_{2}\right) v_{f} \text { (संवेग संरक्षण के नियम से)} \\ & v_{f}=\frac{m_{1}}{m_{1}+m_{2}} v_{1 i} \tag{5.22} \end{align*} $$
संघट्ट में गतिज ऊर्जा की क्षतिः
$$ \begin{aligned} & \Delta K=\frac{1}{2} m _{1} v _{1 i}^{2}-\frac{1}{2}\left(m _{1}+m _{2}\right) v _{f}^{2} \\ & =\frac{1}{2} m _{1} v _{1 i}^{2}-\frac{1}{2} \frac{m _{1}^{2}}{m _{1}+m _{2}} v _{1 i}^{2} \quad \text { [समीकरण (5.22) द्वारा] } \\ & \quad=\frac{1}{2} m _{1} v _{1 i}^{2}\left[1-\frac{m _{1}}{m _{1}+m _{2}}\right] \\ & =\frac{1}{2} \frac{m _{1} m _{2}}{m _{1}+m _{2}} v _{1 i}^{2} \end{aligned} $$
जो कि अपेक्षानुसार एक धनात्मक राशि है।
आइए, अब प्रत्यास्थ संघट्ट की स्थिति का अध्ययन करते हैं। उपरोक्त नामावली के प्रयोग के साथ $\theta _{1}=\theta _{2}=0$ लेने पर, रेखीय संवेग एवं गतिज ऊर्जा के संरक्षण की समीकरण निम्न है:
$$ \begin{align*} & m _{1} v _{1 i}=m _{1} v _{1 f}+m _{2} v _{2 f} \tag{5.23} \\ & m _{1} v _{1 i}^{2}=m _{1} v _{1 f}^{2}+m _{2} v _{2 f}^{2} \tag{5.24} \end{align*} $$
समीकरण (5.23) और समीकरण (5.24) से हम प्राप्त करते हैं
$$ m _{1} v _{1 i}\left(v _{2 f}-v _{1 i}\right)=m _{1} v _{1 f}\left(v _{2 f}-v _{1 f}\right) $$
अथवा,
$$ \begin{align*} v _{2 f}\left(v _{1 i}-v _{1 f}\right) & =v _{1 i}^{2}-v _{1 f}^{2} \\ & =\left(v _{1 i}-v _{1 f}\right)\left(v _{1 i}+v _{1 f}\right) \tag{5.25} \end{align*} $$
अतः $\quad v _{2 f}=v _{1 i}+v _{1 f}$ इसे समीकरण (5.23) में प्रतिस्थापित करने पर हम प्राप्त करते हैं
$$ \begin{align*} v_{1 f} & =\frac{\left(m_{1}-m_{2}\right)}{m_{1}+m_{2}} v_{1 i} \tag{5.26}\\ \text { तथा} \quad v_{2 f} & =\frac{2 m_{1} v_{1 i}}{m_{1}+m_{2}} \tag{5.27} \end{align*} $$
इस प्रकार ‘अज्ञात राशियाँ’ $\left\{v _{1 f}, v _{2 f}\right\}$ ज्ञात राशियों $\left\{m _{1}, m _{2}, v _{1 i}\right\}$ के पदों में प्राप्त हो गई हैं। आइए, अब उपरोक्त विश्लेषण से विशेष दशाओं में रुचिकर निष्कर्ष प्राप्त करते हैं।
दशा I : यदि दोनों द्रव्यमान समान हैं, अर्थात् $m _{1}=m _{2}$, तब
$$ \begin{aligned} & V_{1 f}=0 \\ & V_{2 f}=V_{1 i} \end{aligned} $$
अर्थात् प्रथम द्रव्यमान विरामावस्था में आ जाता है और संघट्ट के पश्चात् दूसरा द्रव्यमान, प्रथम द्रव्यमान का आरंभिक वेग प्राप्त कर लेता है।
दशा II : यदि एक पिंड का द्रव्यमान दूसरे पिंड के द्रव्यमान से बहुत अधिक है, अर्थात् $m _{2}>m _{1}$, तब
$$ V _{1 f} \simeq-V _{1 i} \quad V _{2 f} \simeq 0 $$
भारी द्रव्यमान स्थिर रहता है जबकि हलके द्रव्यमान का वेग उत्क्रमित हो जाता है।
उदाहरण 5.11 गतिशील न्यूट्रॉनों का मंदन : किसी नाभिकीय रिऐक्टर में तीव्रगामी न्यूट्रॉन (विशिष्ट रूप से वेग $10^{7} \mathrm{~m} \mathrm{~s}^{-1}$ ) को $10^{3} \mathrm{~m} \mathrm{~s}^{-1}$ के वेग तक मंदित कर दिया जाना चाहिए ताकि नाभिकीय विखंडन अभिक्रिया में न्यूट्रॉन की यूरेनियम के समस्थानिक ${ } _{92}^{235} \mathrm{U}$ से अन्योन्यक्रिया करने की प्रायिकता उच्च हो जाए। सिद्ध कीजिए कि न्यूट्रॉन एक हलके नाभिक, जैसे ड्यूटीरियम या कार्बन जिसका द्रव्यमान न्यूट्रॉन के द्रव्यमान का मात्र कुछ गुना है, से प्रत्यास्थ संघट्ट करने में अपनी अधिकांश गतिज ऊर्जा की क्षति कर देता है। ऐसे पदार्थ प्रायः भारी जल $\left(\mathrm{D} _{2} \mathrm{O}\right)$ अथवा ग्रेफाइट, जो न्यूट्रॉनों की गति को मंद कर देते हैं, ‘मंदक’ कहलाते हैं ।
हल न्यूट्रॉन की प्रारंभिक गतिज ऊर्जा है
$$ K _{1 i}=\frac{1}{2} m _{1} v _{1 i}^{2} $$
जबकि समीकरण (5.26) से इसकी अंतिम गतिज ऊर्जा है
$$ K _{1 f}=\frac{1}{2} m _{1} v _{1 f}^{2}=\frac{1}{2} m _{1}\left(\frac{m _{1}-m _{2}}{m _{1}+m _{2}}\right)^{2} v _{1 i}^{2} $$
क्षयित आंशिक गतिज ऊर्जा है
$$ f _{1}=\frac{K _{1 f}}{K _{1 i}}=\left(\frac{m _{1}-m _{2}}{m _{1}+m _{2}}\right)^{2} $$
जबकि विमंदक नाभिक $K _{2 f} / K _{1 i}$ द्वारा भिन्नात्मक गतिज ऊर्जा वृद्धि है ।
$$ f _{2}=1-f _{1} \text { ( प्रत्यास्थ संघट्ट) } $$ $$ =\frac{4 m _{1} m _{2}}{\left(m _{1}+m _{2}\right)^{2}} $$
उपरोक्त परिणाम को समीकरण (5.27) से प्रतिस्थापित करके भी सत्यापित किया जा सकता है।
ड्यूटीरियम के लिए, $m _{2}=2 m _{1}$ और हम प्राप्त करते हैं $f _{1}=1 / 9$, जबकि $f _{2}=8 / 9$ है। अत: न्यूट्रॉन की लगभग $90 \%$ ऊर्जा ड्यूटीरियम को हस्तांतरित हो जाती है। कार्बन के लिए, $f _{1}=71.6 \%$ और $f _{2}=28.4 \%$ है। हालांकि, व्यवहार में, सीधा संघ्ट्ट विरले ही होने के कारण यह संख्या काफी कम होती है।
यदि दोनों पिंडों के आरंभिक तथा अंतिम वेग एक ही सरल रेखा के अनुदिश कार्य करते हैं तो ऐसे संघट्ट को एकविमीय संघट्ट अथवा सीधा संघट्ट कहते हैं। छोटे गोलीय पिंडों के लिए यह संभव है कि पिंड 1 की गति की दिशा विरामावस्था में रखे पिंड 2 के केन्द्र से होकर गुजरे। सामान्यतः, यदि आरंभिक वेग तथा अंतिम वेग एक ही तल में हों तो संघट्ट द्विविमीय कहलाता है।
5.11.3 द्विविमीय संघट्ट
चित्र 5.10 स्थिर द्रव्यमान $m _{2}$ से गतिमान द्रव्यमान $m _{1}$ का संघट्ट का चित्रण करता है। इस प्रकार के संघट्ट में रेखीय संवेग संरक्षित रहता है। चूंकि संवेग एक सदिश राशि है, अतः यह तीन दिशाओं ${x, y, z}$ के लिए तीन समीकरण प्रदर्शित करता है। संघट्ट के पश्चात् $m _{1}$ तथा $m _{2}$ के अंतिम वेग की दिशाओं के आधार पर समतल का निर्धारण कीजिए और मान लीजिए कि यह $x-y$ समतल है। रेखीय संवेग के $z$ - घटक का संरक्षण यह दर्शाता है कि संपूर्ण संघट्ट $x$ - $y$ समतल में है। $x$-घटक और $y$-घटक के समीकरण निम्न हैं :
$$ \begin{gather*} m _{1} v _{1 \mathrm{i}}=m _{1} v _{1 \mathrm{f}} \cos \theta _{1}+m _{2} v _{2 \mathrm{f}} \cos \theta _{2} \tag{5.28} \\ 0=m _{1} v _{1 \mathrm{f}} \sin \theta _{1}-m _{2} V _{2 \mathrm{f}} \sin \theta _{2} \tag{5.29} \end{gather*} $$
अधिकतर स्थितियों में यह माना जाता है कि $\left\{m _{1}, m _{2}, v _{1 i}\right\}$ ज्ञात है। अतः संघट्ट के पश्चात्, हमें चार अज्ञात राशियाँ $\left\{V _{1 f}, V _{2 f}, \theta _{1}\right.$ और $\left.\theta _{2}\right\}$ प्राप्त होती हैं जबकि हमारे पास मात्र दो समीकरण हैं। यदि $\theta _{1}=\theta _{2}=0$, हम पुन: एकविमीय संघट्ट के लिए समीकरण (5.24) प्राप्त कर लेते हैं।
अब यदि संघट्ट प्रत्यास्थ है तो,
$$ \begin{equation*} \frac{1}{2} m _{1} v _{1 i}^{2}=\frac{1}{2} m _{1} v _{1 f}^{2}+\frac{1}{2} m _{2} v _{2 f}^{2} \tag{5.30} \end{equation*} $$
यह हमें समीकरण (5.28) व (5.29) के अलावा एक और समीकरण देता है लेकिन अभी भी हमारे पास सभी अज्ञात राशियों का पता लगाने के लिए एक समीकरण कम है। अतः प्रश्न को हल करने के लिए, चार अज्ञात राशियों में से कम से कम एक और राशि, मान लीजिए $\theta _{1}$, ज्ञात होनी चाहिए। उदाहरणार्थ, कोण $\theta _{1}$ का निर्धारण संसूचक को कोणीय रीति में $x$-अक्ष से $y$-अक्ष तक घुमा कर किया जा सकता है। राशियों $\left\{m _{1}, m _{2}, v _{1 i}, \theta _{1}\right\}$ के ज्ञात मान से हम समीकरण (5.28)-(5.30) का प्रयोग करके $\left\{v _{1 f}, v _{2 f}, \theta _{2}\right\}$ का निर्धारण कर सकते हैं।
उदाहरण 5.12 मान लीजिए कि चित्र 5.10 में चित्रित संघट्ट बिलियर्ड की समान द्रव्यमान $\left(m _{1}=m _{2}\right)$ वाली दो गेंदों के मध्य हुआ है जिसमें प्रथम गेंद क्यू (डण्डा) कहलाती है और द्वितीय गेंद ‘लक्ष्य’ कहलाती है। खिलाड़ी लक्ष्य गेंद को $\theta _{2}=37^{\circ}$ के कोण पर कोने में लगी थैली में गिराना चाहता है। यहाँ मान लीजिए कि संघट्ट प्रत्यास्थ है तथा घर्षण और घूर्णन गति महत्त्वपूर्ण नहीं हैं। कोण $\theta _{1}$ ज्ञात कीजिए।
हल चूंकि द्रव्यमान समान हैं अतः संवेग संरक्षण के नियमानुसार,समीकरण के दोनों पक्षों का वर्ग करने पर प्राप्त होता है
$$ \mathbf{v} _{1 i}=\mathbf{v} _{1 \mathrm{f}}+\mathbf{v} _{2 \mathrm{f}} $$
$$ \begin{gather*} v _{1 i}^{2}=\left(\mathbf{v} _{1 f}+\mathbf{v} _{2 f}\right) \cdot\left(\mathbf{v} _{1 f}+\mathbf{v} _{2 f}\right) \\ =v _{1 f}^{2}+v _{2 f}^{2}+2 \mathbf{v} _{1 f} \cdot \mathbf{v} _{2 f} \\ =\left\{{v _{1 f}}^{2}+v _{2 f}^{2}+2 v _{1 f} v _{2 f} \cos \left(\theta _{1}+37^{\circ}\right)\right\} \tag{5.31} \end{gather*} $$
चूंकि संघट्ट प्रत्यास्थ है और द्रव्यमान $m _{1}=m _{2}$ है, गतिज ऊर्जा के सरंक्षण, समीकरण (5.31) से हमें प्राप्त होता है
$$ \begin{equation*} v _{1 i}^{2}=v _{1 f}^{2}+v _{2 f}^{2} \tag{5.32} \end{equation*} $$
उपरोक्त दोनों समीकरणों (5.31) और (5.32) की तुलना करने पर,
$$ \cos \left(\theta _{1}+37^{\circ}\right)=0 $$
अतः $\quad \theta _{1}+37^{\circ}=90^{\circ}$
अथवा, $\theta _{1}=53^{\circ}$
इससे सिद्ध होता है कि जब समान द्रव्यमान के दो पिंड जिनमें से एक स्थिर है, पृष्ठसर्पी प्रत्यास्थ संघट्ट करते हैं तो संघट्ट के पश्चात्, दोनों एक-दूसरे से समकोण बनाते हुए गति करेंगे। यदि हम चिकने पृष्ठ वाले गोलीय द्रव्यमानों पर विचार करें और मान लें कि संघट्ट तभी होता है जब पिंड एक दूसरे को स्पर्श करे तो विषय अत्यंत सरल हो जाता है। मारबल, कैरम तथा बिलियार्ड के खेल में ठीक ऐसा ही होता है।
हमारे दैनिक जीवन में संघट्ट तभी होता है जब दो वस्तुएँ एक दूसरे को स्पर्श करें। लेकिन विचार कीजिए कि कोई धूमकेतु दूरस्थ स्थान से सूर्य की ओर आ रहा है अथवा अल्फा कण किसी नाभिक की ओर आता हुआ किसी दिशा में चला जाता है। यहाँ पर हमारी दूरी पर कार्यरत बलों से सामना होता है। इस प्रकार की घटना को प्रकीर्णन कहते हैं। जिस वेग तथा दिशाओं में दोनों कण गतिमान होंगे वह उनके आरंभिक वेग, उनके द्रव्यमान, आकार तथा आमाप तथा उनके बीच होने वाली अन्योन्य क्रिया के प्रकार पर निर्भर है।
सारांश
1. कार्य-ऊर्जा प्रमेय के अनुसार, किसी पिंड की गतिज ऊर्जा में परिवर्तन उस पर आरोपित कुल बल द्वारा किया गया कार्य है।
$$ K _{f}-K _{i}=W _{n e t} $$
2. कोई बल संरक्षी कहलाता है यदि (i) उसके द्वारा किसी पिंड पर किया गया कार्य पथ पर निर्भर न करके केवल सिरे के बिंदुओं $\left\{x _{1}, x _{\mathrm{j}}\right\}$ पर निर्भर करता है, अथवा (ii) बल द्वारा किया गया कार्य शून्य होता है, जब पिंड के लिए जो स्वेच्छा से किसी ऐसे बंद पथ में स्वतः अपनी प्रारंभिक स्थिति पर वापस आ जाता है।
3. एकविमीय संरक्षी बल के लिए हम स्थितिज ऊर्जा फलन $V(x)$ को इस प्रकार परिभाषित सकते हैं
$$ F(x)=-\frac{\mathrm{d} V(x)}{\mathrm{d} x} $$
अथवा, $\quad V _{i}-V _{s}=\int _{x _{i}}^{x _{f}} F(x) \mathrm{d} x$
4. यांत्रिक ऊर्जा-संरक्षण के सिद्धांत के अनुसार, यदि किसी पिंड पर कार्यरत बल संरक्षी हैं तो पिंड की कुल यांत्रिक ऊर्जा अचर रहती हैं।
5. $m$ द्रव्यमान के किसी कण की पृथ्वी की सतह से $x$ ऊँचाई पर गुरुत्वीय स्थितिज ऊर्जा $V(x)=m g x$ होती है, जहाँ ऊँचाई के साथ $g$ के मान में परिवर्तन उपेक्षणीय है।
6. $k$ बल-नियतांक वाले स्प्रिंग, जिसमें खिंचाव $x$ है, की प्रत्यास्थ स्थितिज ऊर्जा होती है :
$$ V(x)=\frac{1}{2} k x^{2} $$
7. दो सदिशों के अदिश अथवा बिंदु गुणनफल को हम $\mathbf{A} \cdot \mathbf{B}$ लिखते हैं (इसे $\mathbf{A}$ डॉट $\mathbf{B}$ के रूप में पढ़ते हैं) $\mathbf{A} \cdot \mathbf{B}$ एक अदिश राशि है जिसका मान $A B \cos \theta$ होता है। $\theta$ सदिशों $\mathbf{A}$ व $\mathbf{B}$ के बीच का कोण है। $\mathbf{A} \cdot \mathbf{B}$ का मान चूंकि $\theta$ पर निर्भर करता है इसलिए यह धनात्मक, त्रृणात्मक अथवा शुन्य हो सकता है। दो सदिशों के अदिश गुणनफल की व्याख्या एक सदिश के परिमाण तथा दूसरे सदिश के पहले घटक के अनुदिश घटक के गुणनफल के रूप में भी कर सकते हैं। एकांक सदिशों
$\hat{\mathbf{i}}, \hat{\mathbf{j}}$ व $\hat{\mathbf{k}}$ के लिए हमें निम्नलिखित तथ्य याद रखने चाहिए : $\hat{\mathbf{i}} \cdot \hat{\mathbf{i}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=\mathbf{1}$ तथा $\hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{k}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{i}}=\mathbf{0}$
अदिश गुणनफल क्रम-विनिमेय तथा वितरण नियमों का पालन करते हैं।
| भौतिक राशि | प्रतीक | विमा | मात्रक | टिप्पणी |
|---|---|---|---|---|
| कार्य | $W$ | $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $\mathrm{W}=\mathbf{F} \cdot \mathbf{d}$ |
| गतिज ऊर्जा | $K$ | $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $K=\frac{1}{2} m v^{2}$ |
| स्थितिज ऊर्जा | $V(x)$ | $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $F(x)=-\frac{\mathrm{d} V(x)}{\mathrm{d} x}$ |
| यांत्रिक ऊर्जा | $E$ | $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-2}\right]$ | $\mathrm{J}$ | $E=K+V$ |
| स्प्रिंग नियतांक | $k$ | $\left[\mathrm{M} \mathrm{T}^{-2}\right]$ | $\mathrm{N} \mathrm{m}$ | $F=-k x$ |
| शक्ति | $P$ | $\left[\mathrm{M} \mathrm{L}^{2} \mathrm{~T}^{-3}\right]$ | $\mathrm{W}$ | $V(x)=\frac{1}{2} k x^{2}$ |
विचारणीय विषय
1. वाक्यांश “किए गए कार्य का परिकलन कीजिए” अधूरा है। हमें विशेष बल या बलों के समूह द्वारा किसी पिंड का निश्चित विस्थापन करने में किए गए कार्य का स्पष्ट उल्लेख करना चाहिए (अथवा संदर्भ देते हुए स्पष्टतया इंगित करना चाहिए)।
2. किया गया कार्य एक अदिश राशि है। यह भौतिक राशि धनात्मक या ऋणात्मक हो सकती है, जबकि द्रव्यमान और गतिज ऊर्जा धनात्मक अदिश राशियाँ हैं। किसी पिंड पर घर्षण या श्यान बल द्वारा किया गया कार्य ऋणात्मक होता है।
3. न्यूटन के तृतीय नियमानुसार, किन्हीं दो पिंडों के मध्य परस्पर एक-दूसरे पर आरोपित बलों का योग शून्य होता है।
$$ \mathbf{F} _{12}+\mathbf{F} _{21}=0 $$
परंतु दो बलों द्वारा किए गए कार्य का योग सदैव शून्य नहीं होता है, अर्थात् $$ W _{12}+W _{21} \neq 0 $$
तथापि, कभी-कभी यह सत्य भी हो सकता है।
4. कभी-कभी किसी बल द्वारा किए गए कार्य की गणना तब भी की जा सकती है जबकि बल की ठीक-ठीक प्रकृति का ज्ञान न भी हो। उदाहरण 5.2 से यह स्पष्ट है, जहाँ कार्य-ऊर्जा प्रमेय का ऐसी स्थिति में प्रयोग किया गया है ।
5. कार्य-ऊर्जा प्रमेय न्यूटन के द्वितीय नियम से स्वतन्त्र नहीं है। कार्य-ऊर्जा प्रमेय को न्यूटन के द्वितीय नियम के अदिश रूप में देखा जा सकता है। यांत्रिक ऊर्जा के संरक्षण के सिद्धांत को, संरक्षी बलों के लिए कार्य-ऊर्जा प्रमेय के एक महत्त्वपूर्ण परिणाम के रूप में समझा जा सकता है।
6. कार्य-ऊर्जा प्रमेय सभी जड़त्वीय फ्रेमों में लागू होती है। इसे अजड़त्वीय फ्रेमों में भी लागू किया जा सकता है यदि विचारणीय पिंड पर आरोपित कुल बलों के परिकलन में छद्म बल के प्रभाव को भी सम्मिलित कर लिया जाए।
7. संरक्षी बलों के अधीन किसी पिंड की स्थितिज ऊर्जा हमेशा किसी नियतांक तक अनिश्चित रहती है। उदाहरणार्थ, किसी पिंड की स्थितिज ऊर्जा किस बिंदु पर शून्य लेनी है, यह केवल स्वेच्छा से चयन किए गए बिंदु पर निर्भर करता है। जैसे गुरुत्वीय स्थितिज ऊर्जा $m g h$ की स्थिति में स्थितिज ऊर्जा के लिए शून्य बिंदु पृथ्वी के पृष्ठ पर लिया गया है। स्प्रिंग के लिए जिसकी ऊर्जा $\frac{1}{2} k x^{2}$ है, स्थितिज ऊर्जा के लिए शून्य बिंदु, दोलायमान द्रव्यमान की माध्य स्थिति पर लिया गया है ।
8. यांत्रिकी में प्रत्येक बल स्थितिज ऊर्जा से संबद्ध नहीं होता है। उदाहरणार्थ, घर्षण बल द्वारा किसी बंद पथ में किया गया कार्य शून्य नहीं है और न ही घर्षण से स्थितिज ऊर्जा को संबद्ध किया जा सकता है।
9. किसी संघट्ट के दौरान (a) संघट्ट के प्रत्येक क्षण में पिंड का कुल रेखीय संवेग संरक्षित रहता है, (b) गतिज ऊर्जा संरक्षण ( चाहे संघट्ट प्रत्यास्थ ही हो) संघट्ट की समाप्ति के पश्चात् ही लागू होता है और संघट्ट के प्रत्येक क्षण के लिए लागू नहीं होता है। वास्तव में, संघट्ट करने वाले दोनों पिंड विकृत हो जाते हैं और क्षण भर के लिए एक दूसरे के सापेक्ष विरामावस्था में आ जाते हैं।
अभ्यास
5.1 किसी वस्तु पर किसी बल द्वारा किए गए कार्य का चि्न समझना महत्त्वपूर्ण है। सावधानीपूर्वक बताइए कि निम्नलिखित राशियाँ धनात्मक हैं या ऋणात्मक :
(a) किसी व्यक्ति द्वारा किसी कुएँ में से रस्सी से बँधी बाल्टी को रस्सी द्वारा बाहर निकालने में किया गया कार्य।
(b) उपर्युक्त स्थिति में गुरुत्वीय बल द्वारा किया गया कार्य।
(c) किसी आनत तल पर फिसलती हुई किसी वस्तु पर घर्षण द्वारा किया गया कार्य।
(d) किसी खुरदरे क्षैतिज तल पर एकसमान वेग से गतिमान किसी वस्तु पर लगाए गए बल द्वारा किया गया कार्य ।
(e) किसी दोलायमान लोलक को विरामावस्था में लाने के लिए वायु के प्रतिरोधी बल द्वारा किया गया कार्य।
Show Answer
#Content Missing5.2 2$\mathrm{~kg}$ द्रव्यमान की कोई वस्तु जो आरंभ में विरामावस्था में है, $7 \mathrm{~N}$ के किसी क्षैतिज बल के प्रभाव से एक मेज पर गति करती है। मेज का गतिज-घर्षण गुणांक 0.1 है। निम्नलिखित का परिकलन कीजिए और अपने परिणामों की व्याख्या कीजिए।
(a) लगाए गए बल द्वारा $10 \mathrm{~s}$ में किया गया कार्य।
(b) घर्षण द्वारा $10 \mathrm{~s}$ में किया गया कार्य।
(c) वस्तु पर कुल बल द्वारा $10 \mathrm{~s}$ में किया गया कार्य ।
(d) वस्तु की गतिज ऊर्जा में $10 \mathrm{~s}$ में परिवर्तन।
Show Answer
#Content Missing5.3 चित्र 5.11 में कुछ एकविमीय स्थितिज ऊर्जा-फलनों के उदाहरण दिए गए हैं। कण की कुल ऊर्जा कोटि-अक्ष पर क्रॉस द्वारा निर्देशित की गई है। प्रत्येक स्थिति में, कोई ऐसे क्षेत्र बताइए, यदि कोई हैं तो, जिनमें दी गई ऊर्जा के लिए, कण को नहीं पाया जा सकता। इसके अतिरिक्त, कण की कुल न्यूनतम ऊर्जा भी निर्देशित कीजिए। कुछ ऐसे भौतिक संदर्भो के विषय में सोचिए जिनके लिए ये स्थितिज ऊर्जा आकृतियाँ प्रासंगिक हों।
चित्र 5.11
Show Answer
#Content Missing5.4 रेखीय सरल आवर्त गति कर रहे किसी कण का स्थितिज ऊर्जा फलन $V(x)=k x^{2} / 2$ है, जहां $k$ दोलक का बल नियतांक है। $k=0.5$ $\mathrm{N} \mathrm{m}^{-1}$ के लिए $V(x)$ व $x$ के मध्य ग्राफ चित्र 5.12 में दिखाया गया है। यह दिखाइए कि इस विभव के अंतर्गत गतिमान कुल $1 \mathrm{~J}$ ऊर्जा वाले कण को अवश्य ही ‘वापिस आना’ चाहिए जब यह $x= \pm 2 \mathrm{~m}$ पर पहुंचता है।

Show Answer
#Content Missing5.5 निम्नलिखित का उत्तर दीजिए:
(a) किसी राकेट का बाह्य आवरण उड़ान के दौरान घर्षण के कारण जल जाता है। जलने के लिए आवश्यक ऊष्मीय ऊर्जा किसके व्यय पर प्राप्त की गई-राकेट या वातावरण ?
(b) धूमकेतु सूर्य के चारों ओर बहुत ही दीर्घवृत्तीय कक्षाओं में घूमते हैं। साधारणतया धूमकेतु पर सूर्य का गुरुत्वीय बल धूमकेतु के लंबवत् नहीं होता है। फिर भी धूमकेतु की संपूर्ण कक्षा में गुरुत्वीय बल द्वारा किया गया कार्य शून्य होता है। क्यों ?
(c) पृथ्वी के चारों ओर बहुत ही क्षीण वायुमण्डल में घूमते हुए किसी कृत्रिम उपग्रह की ऊर्जा धीरे-धीरे वायुमण्डलीय प्रतिरोध (चाहे यह कितना ही कम क्यों न हो) के विरुद्ध क्षय के कारण कम होती जाती है फिर भी जैसे-जैसे कृत्रिम उपग्रह पृथ्वी के समीप आता है तो उसकी चाल में लगातार वृद्धि क्यों होती है ?
(d) चित्र 5.13(i) में एक व्यक्ति अपने हाथों में $15 \mathrm{~kg}$ का कोई द्रव्यमान लेकर 2m चलता है। चित्र 5.13 (ii) में वह उतनी ही दूरी अपने पीछे रस्सी को खींचते हुए चलता है। रस्सी घिरनी पर चढ़ी हुई है और उसके दूसरे सिरे पर $15 \mathrm{~kg}$ का द्रव्यमान लटका हुआ है। परिकलन कीजिए कि किस स्थिति में किया गया कार्य अधिक है ?
चित्र 5.13
Show Answer
#Content Missing5.6 सही विकल्प को रेखांकित कीजिए :
(a) जब कोई संरक्षी बल किसी वस्तु पर धनात्मक कार्य करता है तो वस्तु की स्थितिज ऊर्जा बढ़ती है/घटती है/अपरिवर्ती रहती है।
(b) किसी वस्तु द्वारा घर्षण के विरुद्ध किए गए कार्य का परिणाम हमेशा इसकी गतिज/स्थितिज ऊर्जा में क्षय होता है।
(c) किसी बहुकण निकाय के कुल संवेग-परिवर्तन की दर निकाय के बाह्य बल/आंतरिक बलों के जोड़ के अनुक्रमानुपाती होती है।
(d) किन्हीं दो पिंडों के अप्रत्यास्थ संघट्ट में वे राशियाँ, जो संघट्ट के बाद नहीं बदलती हैं; निकाय की कुल गतिज ऊर्जा/कुल रेखीय संवेग/कुल ऊर्जा हैं।
Show Answer
#Content Missing5.7 बतलाइए कि निम्नलिखित कथन सत्य हैं या असत्य। अपने उत्तर के लिए कारण भी दीजिए।
(a) किन्हीं दो पिंडों के प्रत्यास्थ संघट्ट में, प्रत्येक पिंड का संवेग व ऊर्जा संरक्षित रहती है।
(b) किसी पिंड पर चाहे कोई भी आंतरिक व बाह्य बल क्यों न लग रहा हो, निकाय की कुल ऊर्जा सर्वदा संरक्षित रहती है।
(c) प्रकृति में प्रत्येक बल के लिए किसी बंद लूप में, किसी पिंड की गति में किया गया कार्य शून्य होता है।
(d) किसी अप्रत्यास्थ संघट्ट में, किसी निकाय की अंतिम गतिज ऊर्जा, आरंभिक गतिज ऊर्जा से हमेशा कम होती है।
Show Answer
#Content Missing5.8 निम्नलिखित का उत्तर ध्यानपूर्वक, कारण सहित दीजिए :
(a) किन्हीं दो बिलियर्ड-गेंदों के प्रत्यास्थ संघट्ट में, क्या गेंदों के संघट्ट की अल्पावधि में (जब वे संपर्क में होती हैं) कुल गतिज ऊर्जा संरक्षित रहती है?
(b) दो गेंदों के किसी प्रत्यास्थ संघट्ट की लघु अवधि में क्या कुल रेखीय संवेग संरक्षित रहता है?
(c) किसी अप्रत्यास्थ संघट्ट के लिए प्रश्न (a) व (b) के लिए आपके उत्तर क्या हैं?
(d) यदि दो बिलियर्ड-गेंदों की स्थितिज ऊर्जा केवल उनके केंद्रों के मध्य, पृथक्करण-दूरी पर निर्भर करती है तो संघट्ट प्रत्यास्थ होगा या अप्रत्यास्थ ? (ध्यान दीजिए कि यहाँ हम संघट्ट के दौरान बल के संगत स्थितिज ऊर्जा की बात कर रहे हैं, ना कि गुरुत्वीय स्थितिज ऊर्जा की)
Show Answer
#Content Missing5.9 कोई पिंड जो विरामावस्था में है, अचर त्वरण से एकविमीय गति करता है। इसको किसी $t$ समय पर दी गई शक्ति अनुक्रमानुपाती है
(i) $t^{1 / 2}$
(ii) $t$
(iii) $t^{3 / 2}$
(iv) $t^{2}$
Show Answer
#Content Missing5.10 एक पिंड अचर शक्ति के स्रोत के प्रभाव में एक ही दिशा में गतिमान है। इसका $t$ समय में विस्थापन, अनुक्रमानुपाती है
(i) $t^{1 / 2}$
(ii) $t$
(iii) $t^{3 / 2}$
(iv) $t^{2}$
Show Answer
#Content Missing5.11 किसी पिंड पर नियत बल लगाकर उसे किसी निर्देशांक प्रणाली के अनुसार $z$ - अक्ष के अनुदिश गति करने के लिए बाध्य किया गया है जो इस प्रकार है
$$ \mathbf{F}=(-\hat{\mathbf{i}}+2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}) \mathrm{N} $$
जहां $\hat{\mathbf{i}}, \hat{\mathbf{j}}, \hat{\mathbf{k}}$ क्रमशः $x$-, $y$ - एवं $z$-अक्ष के अनुदिश एकांक सदिश हैं। इस वस्तु को $z$-अक्ष के अनुदिश $4 \mathrm{~m}$ की दूरी तक गति कराने के लिए आरोपित बल द्वारा किया गया कार्य कितना होगा ?
Show Answer
#Content Missing5.12 किसी अंतरिक्ष किरण प्रयोग में एक इलेक्ट्रॉन और एक प्रोटॉन का संसूचन होता है जिसमें पहले कण की गतिज ऊर्जा $10 \mathrm{keV}$ है और दूसरे कण की गतिज ऊर्जा $100 \mathrm{keV}$ है। इनमें कौन-सा तीव्रगामी है, इलेक्ट्रॉन या प्रोटॉन ? इनकी चालों का अनुपात ज्ञात कीजिए। (इलेक्ट्रॉन का द्रव्यमान $=9.11 \times 10^{-31} \mathrm{~kg}$, प्रोटॉन का द्रव्यमान $=1.67 \times 10^{-27} \mathrm{~kg}, 1 \mathrm{eV}$ $\left.=1.60 \times 10^{-19} \mathrm{~J}\right)$
Show Answer
#Content Missing5.13 $2 \mathrm{~mm}$ त्रिज्या की वर्षा की कोई बूंद $500 \mathrm{~m}$ की ऊंचाई से पृथ्वी पर गिरती है। यह अपनी आरंभिक ऊंचाई के आधे हिस्से तक (वायु के श्यान प्रतिरोध के कारण) घटते त्वरण के साथ गिरती है और अपनी अधिकतम (सीमान्त) चाल प्राप्त कर लेती है, और उसके बाद एकसमान चाल से गति करती है। वर्षा की बूंद पर उसकी यात्रा के पहले व दूसरे अर्ध भागों में गुरुत्वीय बल द्वारा किया गया कार्य कितना होगा ? यदि बूंद की चाल पृथ्वी तक पहुंचने पर $10 \mathrm{~m} \mathrm{~s}^{-1}$ हो तो संपूर्ण यात्रा में प्रतिरोधी बल द्वारा किया गया कार्य कितना होगा ?
Show Answer
#Content Missing5.14 किसी गैस-पात्र में कोई अणु $200 \mathrm{~m} \mathrm{~s}^{-1}$ की चाल से अभिलंब के साथ $30^{\circ}$ का कोण बनाता हुआ क्षैतिज दीवार से टकराकर पुनः उसी चाल से वापस लौट जाता है। क्या इस संघट्ट में संवेग संरक्षित है? यह संघट्ट प्रत्यास्थ है या अप्रत्यास्थ ?
Show Answer
#Content Missing5.15 किसी भवन के भूतल पर लगा कोई पंप $30 \mathrm{~m}^{3}$ आयतन की पानी की टंकी को 15 मिनट में भर देता है। यदि टंकी पृथ्वी तल से $40 \mathrm{~m}$ ऊपर हो और पंप की दक्षता $30 \%$ हो तो पंप द्वारा कितनी विद्युत शक्ति का उपयोग किया गया ?
Show Answer
#Content Missing5.16 दो समरूपी बॉल-बियरिंग एक-दूसरे के संपर्क में हैं और किसी घर्षणरहित मेज पर विरामावस्था में हैं। इनके साथ समान द्रव्यमान का कोई दूसरा बॉल-बियरिंग, जो आरंभ में $V$ चाल से गतिमान है, सम्मुख संघट्ट करता है। यदि संघट्ट प्रत्यास्थ है तो संघट्ट के पश्चात् निम्नलिखित (चित्र 5.14) में से कौन-सा परिणाम संभव है?

चित्र 5.14
Show Answer
#Content Missing5.17 किसी लोलक के गोलक $\mathrm{A}$ को, जो ऊर्ध्वाधर से 30 का कोण बनाता है, छोड़े जाने पर मेज पर, विरामावस्था में रखे दूसरे गोलक $\mathrm{B}$ से टकराता है जैसा कि चित्र 5.15 में प्रदर्शित है। ज्ञात कीजिए कि संघट्ट के पश्चात् गोलक $\mathrm{A}$ कितना ऊंचा उठता है? गोलकों के आकारों की उपेक्षा कीजिए और मान लीजिए कि संघट्ट प्रत्यास्थ है।

चित्र 5.15
Show Answer
#Content Missing5.18 किसी लोलक के गोलक को क्षैतिज अवस्था से छोड़ा गया है। यदि लोलक की लंबाई $1.5 \mathrm{~m}$ है तो निम्नतम बिंदु पर आने पर गोलक की चाल क्या होगी? यह दिया गया है कि इसकी आरंभिक ऊर्जा का $5 \%$ अंश वायु प्रतिरोध के विरुद्ध क्षय हो जाता है।
Show Answer
#Content Missing5.19 $300 \mathrm{~kg}$ द्रव्यमान की कोई ट्रॉली, $25 \mathrm{~kg}$ रेत का बोरा लिए हुए किसी घर्षणरहित पथ पर $27 \mathrm{~km} \mathrm{~h}^{-1}$ की एकसमान चाल से गतिमान है। कुछ समय पश्चात् बोरे में किसी छिद्र से रेत $0.05 \mathrm{~kg} \mathrm{~s}^{-1}$ की दर से निकलकर ट्राली के फर्श पर रिसने लगती है। रेत का बोरा खाली होने के पश्चात ट्रॉली की चाल क्या होगी ?
Show Answer
#Content Missing5.20 $0 .5 \mathrm{~kg}$ द्रव्यमान का एक कण $V=a X^{3 / 2}$ वेग से सरल रेखीय गति करता है जहां $a=5 \mathrm{~m}^{-1 / 2} \mathrm{~s}^{-1}$ है। $X=0$ से $x=2 \mathrm{~m}$ तक इसके विस्थापन में कुल बल द्वारा किया गया कार्य कितना होगा ?
Show Answer
#Content Missing5.21 किसी पवनचक्की के ब्लेड, क्षेत्रफल $A$ के वृत्त जितना क्षेत्रफल प्रसर्प करते हैं। (a) यदि हवा $V$ वेग से वृत्त के लंबवत् दिशा में बहती है तो $t$ समय में इससे गुजरने वाली वायु का द्रव्यमान क्या होगा ? (b) वायु की गतिज ऊर्जा क्या होगी ? (c) मान लीजिए कि पवनचक्की हवा की $25 \%$ ऊर्जा को विद्युत ऊर्जा में रूपान्तरित कर देती है। यदि $A=30 \mathrm{~m}^{2}$, और $V=36 \mathrm{~km} \mathrm{~h}^{-1}$ और वायु का घनत्व $1.2 \mathrm{~kg} \mathrm{~m}^{-3}$ है तो उत्पन्न विद्युत शक्ति का परिकलन कीजिए।
Show Answer
#Content Missing5.22 कोई व्यक्ति वजन कम करने के लिए $10 \mathrm{~kg}$ द्रव्यमान को $0.5 \mathrm{~m}$ की ऊंचाई तक 1000 बार उठाता है। मान लीजिए कि प्रत्येक बार द्रव्यमान को नीचे लाने में खोई हुई ऊर्जा क्षयित हो जाती है। (a) वह गुरुत्वाकर्षण बल के विरुद्ध कितना कार्य करता है ? (b) यदि वसा $3.810^{7} \mathrm{~J}$ ऊर्जा प्रति किलोग्राम आपूर्ति करता हो जो कि $20 \%$ दक्षता की दर से यांत्रिक ऊर्जा में परिवर्तित हो जाती है तो वह कितनी वसा खर्च कर डालेगा?
Show Answer
#Content Missing5.23 कोई परिवार $8 \mathrm{~kW}$ विद्युत-शक्ति का उपभोग करता है। (a) किसी क्षैतिज सतह पर सीधे आपतित होने वाली सौर ऊर्जा की औसत दर $200 \mathrm{~W} \mathrm{~m}^{-2}$ है। यदि इस ऊर्जा का $20 \%$ भाग लाभदायक विद्युत ऊर्जा में रूपान्तरित किया जा सकता है तो $8 \mathrm{~kW}$ की विद्युत आपूर्ति के लिए कितने क्षेत्रफल की आवश्यकता होगी ? (b) इस क्षेत्रफल की तुलना किसी विशिष्ट भवन की छत के क्षेत्रफल से कीजिए।





